Vertiport障碍物限制几何构型研究报告
Vertiport 障碍物限制几何构型研究报告
——基于 ICAO Heliport Manual 源头、ICAO 体系与 FAA 体系差异的工程评估研究日期:2026 年 5 月 29 日
一、研究目的与总体判断
本报告围绕电动垂直起降航空器起降场(Vertiport)的障碍物限制几何构型开展专题研究。研究重点不是对各国标准进行一般性摘录,而是从直升机场标准源头出发,追溯FATO、TLOF、Safety Area、OLS 等概念的形成逻辑,进而分析其在eVTOL城市起降场条件下为何发展出OFV等新型三维保护体积。
总体判断是:Vertiport障碍物限制并非从零开始建立,而是严格延续传统 heliport 标准的几何底盘。ICAO Annex 14 Volume II和ICAO Doc 9261构成源头框架;MH5013 等国内直升机场标准属于该框架的本地化实施。中国团标不是另造一套净空体系,而是在延续 Heliport Manual 和 MH5013 传统 OLS 设定的基础上,借鉴EASA的OFV概念,用OFV把eVTOL的垂直拉起能力与传统OLS 衔接起来。FAA EB105A 则明显不同,其核心仍是 14 CFRPart 77 imaginary surfaces,同时以 D/RD 和 DCA 处理 eVTOL 的新风险。
进一步说,团标的大逻辑与 EASA 提出 OFV 的初衷是一致的:当某一场址从地面安全区边界直接建立传统 OLS 存在困难时,不是放弃 OLS,而是利用 eVTOL 具备垂直拉升能力的特点,先用 OFV 把 OLS 起点抬高;当抬高到能够设立传统 OLS 并满足越障要求时,就不再继续抬高。也就是说,OFV服务于OLS,h0服务于越障闭合。
这一路径同时避免了两个极端:一是机械套用传统直升机场OLS,导致大量城市复杂场址无法进入工程论证;二是把OFV做成依赖具体机型程序参数的复杂体积,导致场地几何不稳定、厂家数据负担过重、选址审查无法闭合。团标选择的中间路线是:传统 OLS 仍然有效,甚至偏保守也可接受;OFV 只负责保护eVTOL 从起降场表面/FATO 标高垂直拉起到 h0 高度的过程;h0由控制障碍物决定,拉到够设立 OLS 即可。
OFV对垂直拉升过程的保护也应遵循工程可用性原则:第一,应尽量简化,便于选址、制图、测量和审查;第二,应尽量延续 heliport 源头逻辑,正好 Heliport Manual 和 MH5013 已有 45°侧向保护斜面的成熟依据;第三,不应依赖某一个具体机型,而应按拟服务范围内的最不利设计机型确定D值,并向下包容较小机型。建成后的起降场是稳定基础设施,后续通过标注可用机型和运行限制来管理适用范围,而不是换一个机型就改变场地造型。
因此,研究 vertiport 障碍物限制必须从源头讲起。无论 ICAO体系还是 FAA 体系,vertiport 标准都不是凭空产生的,而是从heliport 标准演化而来。二者的分化在 heliport 阶段已经存在:ICAO 体系以 Annex 14 Volume II 和 Doc 9261 为源头,形成FATO、TLOF、Safety Area 和 OLS 的国际框架;EASA 和中国CAAC/MH5013/团标均应归入这一 ICAO 系,只是 EASA 在vertiport阶段率先提出OFV这一扩展概念,中国团标则在ICAO/MH5013主线上吸收OFV并重构其工程构型。FAA同样从传统 heliport 出发,但更多依托美国本土 AC 150/5390-2D、14CFR Part 77 和空域评价制度,发展出 EB105A 中以 Part 77imaginary surfaces、D/RD 和 DCA 为核心的 vertiport 路径。因此,FAA与ICAO不是无关两支,而是同源不同支;在传统heliport 领域,两套标准长期“相爱相杀”,行业学者和工程实践不断比较其差异,并在尺寸控制、净空评价、运行安全和风险缓解等方面相互吸收、融合和发展。
在 ICAO 系内部,EASA PTS-VPT-DSN 的开创性在于提出OFV概念。这里必须明确:EASA不是FAA旁支,而是与ICAO/CAAC同属传统heliport逻辑延伸出来的一条欧洲路径,且EASA 文件自身也明确以 EASA 直升机场规范、ICAO Annex 14Volume II 和 ICAO Document 9261 Heliport Manual 为基础,同时吸收VTOL制造商和专家输入。EASA在Chapter D中还明确说明,Subpart 1 的传统 OLS 来自 Annex 14 Volume II 和 Doc9261,Subpart 2 才是 vertiport 的 OFV 概念。OFV 确实具有突出的创意和实用价值:它敏锐地抓住了 eVTOL 区别于传统直升机场应用场景的关键,城市复杂地区往往无法从地面安全区边界直接建立传统 OLS,但 eVTOL 具备垂直起降和垂直拉升能力,可以先在受保护的三维体积内拉升到一定高度,再接入传统进离场保护面。理论上,OFV解决了复杂地区无法按传统直升机场方式设立净空面的难题,这是 EASA 方案最重要的亮点。
中国团标的价值在于:在 ICAO 系内部承认并吸收 EASA 提出 OFV 的方向性创新,但不简单照搬其构型方法,而是把 OFV重新嵌入 ICAO/Heliport Manual/MH5013 的传统 OLS 逻辑之中。也就是说,EASA 与 CAAC 并非两个完全割裂的体系,二者共同基础都是 heliport 的 FATO、TLOF、Safety Area 和 OLS;差异在于OFV构型方法。中国路径应以ICAO系一脉相承的技术路线为主线,在既有直升机场标准基础上,通过h0和OFV把eVTOL能力转化为可审查、可制图、可复制的净空工程方法;同时,应保持对FAA体系的开放借鉴,吸收其在D/RD区分、Part 77空域评价、DCA下洗/外洗风险控制等方面的有益成果。

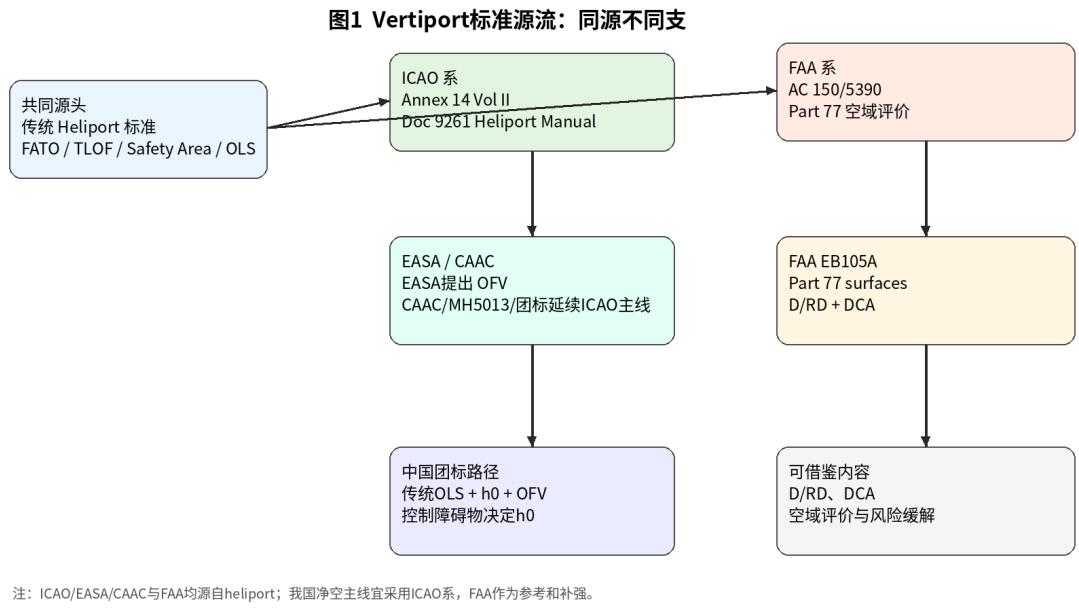
图 1 Vertiport 障碍物限制标准源流与分化
二、源头框架:ICAO 直升机场标准的几何基础
(一)FATO、TLOF 与 Safety Area 构成全部障碍物限制的底盘
ICAO Annex 14 Volume II 规定,FATO 是完成最终进近至悬停或着陆、并开始起飞动作的区域;TLOF是直升机接地或离地的区域;Safety Area 是围绕 FATO 设置、用于降低航空器意外偏离FATO风险的保护区。在ICAO/MH5013主线中,传统进近面和起飞爬升面的内边位置就是Safety Area外边界;如设置净空道,则起飞爬升面可从净空道端部起算。FATO决定运行核心、中心线和最小规定宽度/直径,Safety Area 决定传统 OLS 的起算边界。不得把 FAA Part 77 中 primary surface=FATO、从 FATO 边缘起算的概念混入 ICAO 系表述。

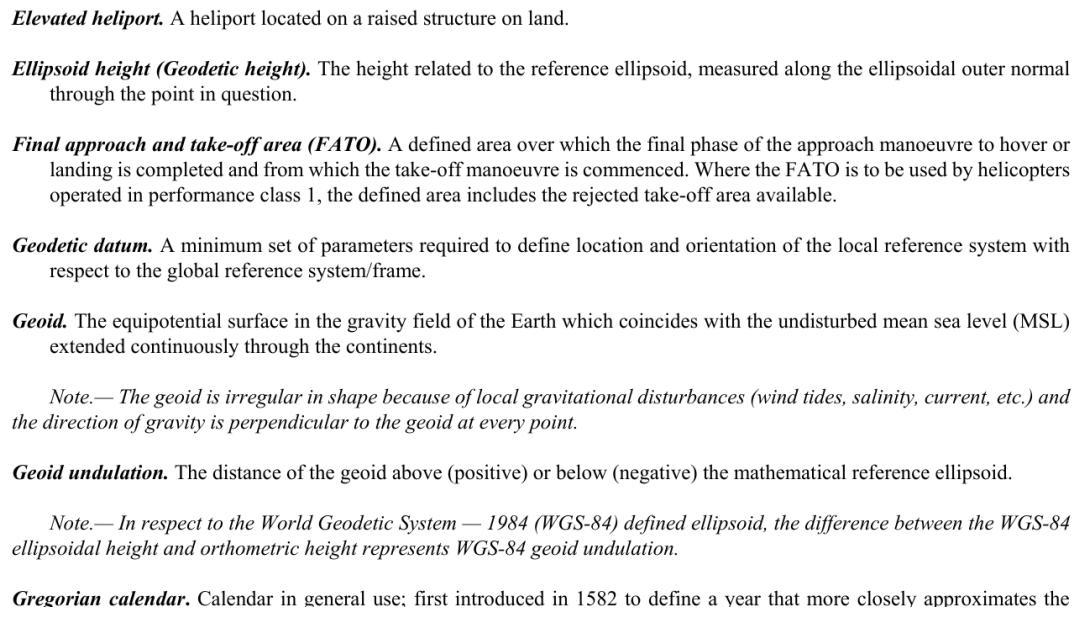
图 2 ICAO Annex 14 Volume II 关于 FATO 的定义摘录

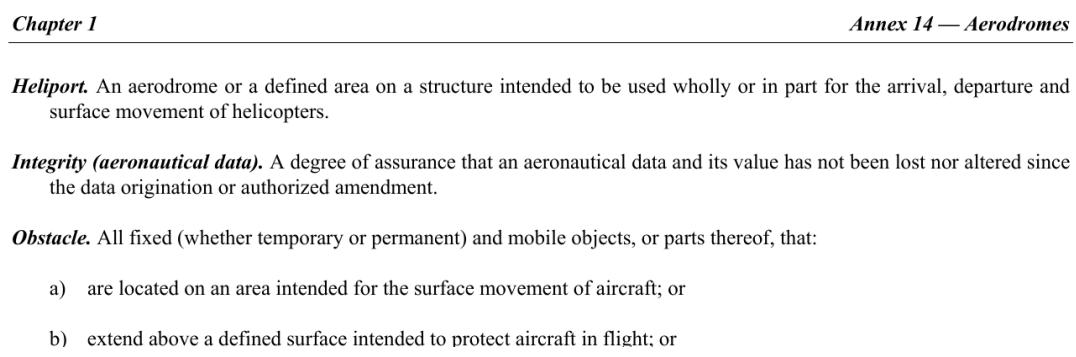
图 3 ICAO Annex 14 Volume II 关于 TLOF 的定义摘录
从几何上看,FATO不是单纯的硬化承载面,而是航空器完成最终进近、悬停、着陆和起飞初始动作的运行包络;TLOF 更偏向接地、离地和承载;Safety Area则是误差缓冲层。因此,在ICAO/MH5013 主线中,OLS 不是从TLOF 边缘起算,也不是从
FATO 边缘起算,而是从 Safety Area 外边界起算;FATO 通过确定运行区域和中心线,间接影响Safety Area外边界的位置和OLS内边宽度。
(二)Doc 9261 解释了 1D、0.83D 与 sub-1D 的工程含义
ICAO Doc 9261 Heliport Manual 对 Annex 14 条文作出工程解释,尤其说明了 1D FATO 与 0.83D TLOF 之间的关系。1D 通常对应直升机最大外廓或旋翼相关包络,用于保证运行阶段的空间包容;0.83D可用于特定场景下的接地/离地区域或承载区域,但这并不意味着障碍物保护空间同步缩小。

图 4 ICAO Doc 9261 关于 1D 与 sub-1D FATO/TLOF 关系的说明
该源头逻辑对eVTOL研究非常关键。eVTOL也存在“整体包络”和“接地点/推进器包络”不一致的问题。如果仅以接地点或起落架范围确定起降场尺寸,容易低估航空器姿态偏差、旋翼/推进器外廓、定位误差和失效工况下的空间需求。
(三)Heliport Manual 印证:基础设施按最不利设计机型,而非单一机型
ICAO Annex 14 Volume II 在总则中明确提出,设计直升机场时,应考虑该直升机场拟服务的 critical design helicopter,即具有最大尺寸组合和最大起飞质量的关键设计直升机。这说明直升机场从源头上就是面向一组拟服务机型设计,而不是为某一架具体航空器临时生成几何边界。
ICAO Doc 9261 Heliport Manual 进一步给出“Design
helicopter”的定义:即具有最大总长和最大审定起飞质量、且直升机场或水上平台按其进行设计的直升机;并特别说明这两个属性不一定集中在同一机型上。这一点非常重要:最不利设计机型并不只是“某一架飞机”,而是从拟服务机型集合中提取控制尺寸、控制重量、控制性能等最不利设计属性。
Doc 9261还在物理特性章节提出,直升机着陆区及停车区应具有足够尺寸和强度,并按需要使用该设施的最重、最大直升机布置和设计,即 design helicopter。障碍物环境章节也规定,FATO应足以包含以 D 为直径的圆,D 等于旋翼转动时直升机最大尺寸;该 D 圆用于包容 design helicopter。
上述条文共同印证:heliport manual 的基础设施设计思路,是先确定拟服务范围,再找出最不利设计机型或最不利设计属性,并用其控制场地几何、承载和净空。建成后的场地应稳定服务设计边界内的机型,而不是随每个具体机型重新改变FATO、TLOF、Safety Area 或障碍物保护构型。
对应到eVTOL团标,D应由最大使用机型确定,体现航空器尺度控制;h0应由场址周边控制障碍物确定,体现环境净空控制。二者合成稳定的场址几何。只要后续使用机型不超过最大使用机型控制尺度,并满足运行限制,就应纳入同一场地净空框架,而不应换一型航空器就重做 OFV 造型。
(四)边界辨析:本报告主线采用 ICAO/MH5013,不混用 FAA 定义
为避免概念混乱,本报告后续分析以 ICAO/HeliportManual/MH5013 为主线,并将 EASA 作为 ICAO 系内部的欧洲vertiport 扩展路径一并讨论。该主线下,FATO、TLOF 和 SafetyArea 各有不同功能:FATO 是最终进近和起飞运行区域,TLOF 是接地/离地区域,Safety Area 是围绕 FATO 的误差缓冲区;传统进近面和起飞爬升面的内边位置通常位于 Safety Area 外边界,或在设置净空道时位于净空道端部。
FAA 体系中“primary surface = FATO”“approach/departuresurface 从 FATO 边缘起算”等表述,属于 FAA Part 77 和 EB105A的独立空域面逻辑,只在FAA旁支比较中使用。中国团标属于ICAO系延续,分析时不能把FAA的FATO边缘起算逻辑混入中国团标或MH5013的OLS构型。
三、传统OLS几何构型剖析
(一)OLS 的基本构成
传统直升机场障碍物限制面(Obstacle Limitation Surfaces,OLS)是一套以 FATO 为运行核心、从 Safety Area 外边界或净空道端部向外、向上展开的二维/三维斜面系统。必须注意,ICAO/MH5013 主线下的 OLS 组成与运行类型相关:目视/非仪表FATO通常要求进近面和起飞爬升面;精密进近、非精密进近或含目视航段面的PinS FATO才要求过渡面,并可进一步涉及内水平面、锥形面等;对于水上平台和船上直升机场,还可涉及无障碍物扇形面和限制障碍物扇形面。

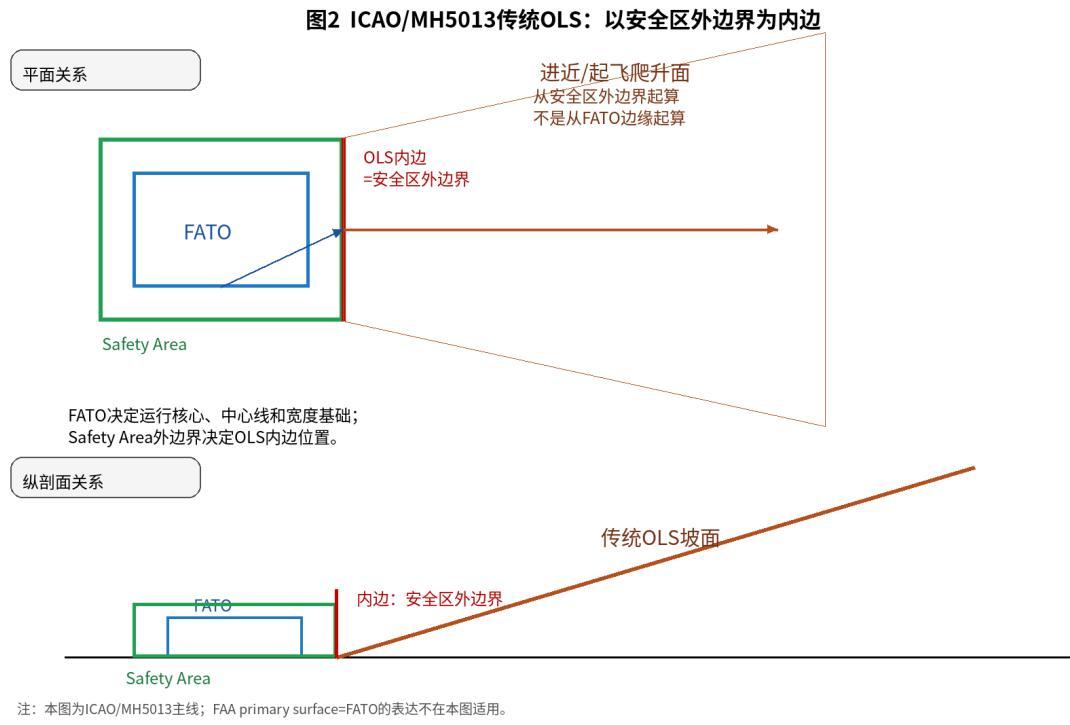
图5 传统OLS几何构型:平面与纵剖面
OLS 的核心几何关系是:内边位于 Safety Area 外边界或净空道端部,内边宽度由 FATO 最小规定宽度/直径与 Safety Area 宽度共同决定;两侧边按规定发散率向外展开;中线沿预定进近或起飞方向延伸;坡度在包含中线的铅垂面内度量。这种几何构型把“飞行路径安全”转换为“空间斜面不得被障碍物穿透”的工程审查问题。
(二)ICAO 与 MH5013 对传统 OLS 的关键要求
| 项目 | ICAO Annex 14 Vol II 源头要求 | MH5013-2023本地化 表达 | 几何含义 |
| 进近面 | 由Safety Area外边界 起,沿FATO中心线 | 进近面为倾斜平面、 平面组合或含转弯的 | 控制到场阶段下降通 道,内边位置为 |
| 延长方向向外、向上展开 | 复合面 | Safety Area外边界 | |
| 起飞爬升面 | 由Safety Area或凈空道端部起,向外向上展开 | 起飞爬升面可为斜面、平面组合或复合面 | 控制离场初始爬升通道 |
| 曲线面 | 转弯半径不得小于270m,30m高度以下通常保持直线段 | 曲线段不多于1个,R+S满足下限,R≥270m | 保证转弯前有加速与稳定空间 |
| 方向数量 | 地面和高架直升机场至少两个进近/起飞爬升面,ICAO为不小于150° | 陆上直升机场宜至少两个,中线夹角宜不小于135° | 避免顺风,降低侧风,提高可用率 |
| 障碍物处置 | 新障碍物不得穿透,既有障碍物应尽可能移除或经航行研究确认 | 叠加面按较严格者控制,局部超高需风险研究和主管部门认可 | OLS是净空审批的核心约束 |
要求应同时考虑,具体见本标准第8.6.2条第5款。
【条文说明】本条第 4 款中,允许超出障碍物限制面的物体可能会限制直升机场的运行。

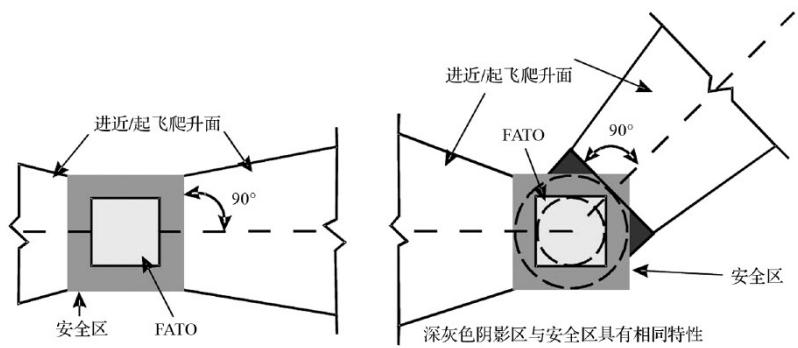
图6.2.1-1 进近/起飞爬升面起始端形式

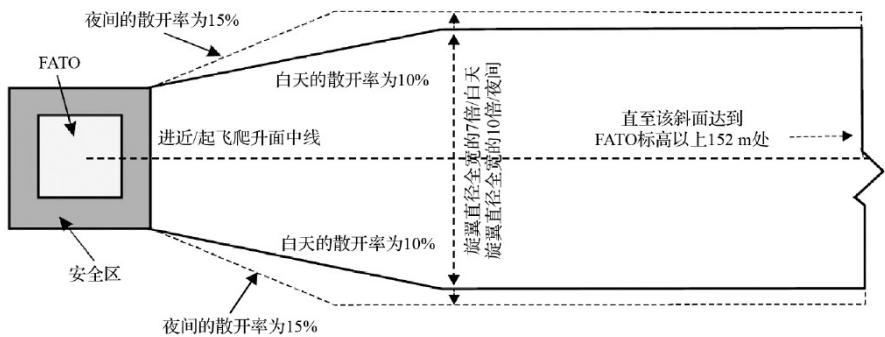
图6.2.1-2目视进近/起飞爬升面宽度

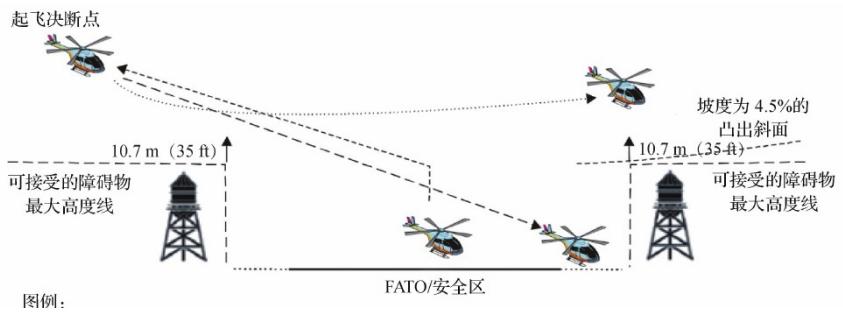
图6 MH5013关于进近/起飞爬升面起始端和宽度的图示

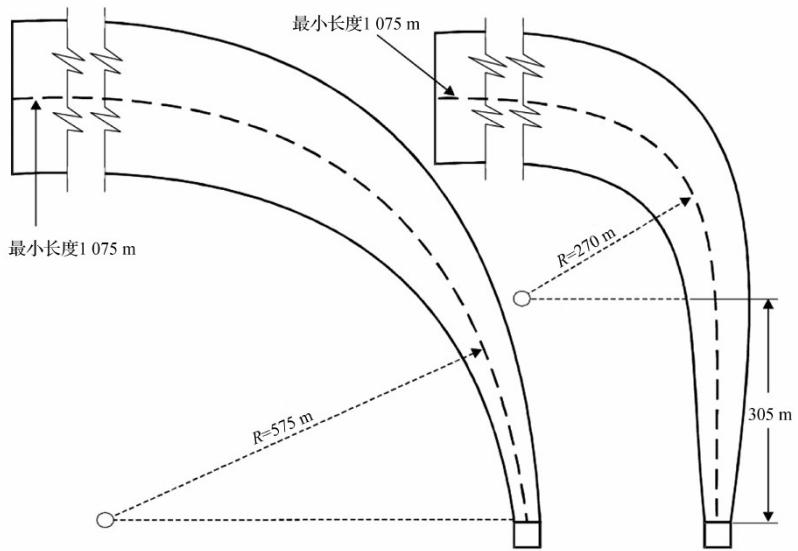
注:1曲线和直线段的任何组合可以使用如下公式来确定:S+R≥575m和S=305m时,R≥270m。式中S为直线段的长度,R为转弯半径。任何≥575m的组合均可行。
2曲线和直线段中线的最小长度为1075m,但是根据所用的坡度可以更长。更长的长度,见表6.2.1-1。
3直升机的起飞性能在曲线段会降低,因此应考虑曲线段开始之前沿起飞爬升面的直线段可允许加速。
图6.2.1-4视曲线进近/起飞爬升面

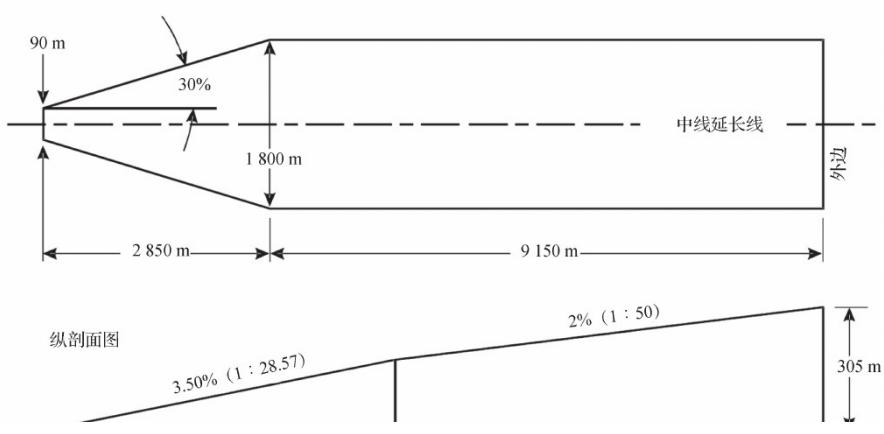
图 7 MH5013 关于曲线进近/起飞爬升面及仪表起飞面的图示
(三)过渡面的必要性:ICAO/MH5013 为按需设置,FAA 为 Part 77 统一纳入
过渡面不能笼统理解为所有直升机场OLS的必备组成。ICAO Annex 14 Volume II 中,过渡面被定义为沿 Safety Area侧边和部分进近面侧边向外、向上倾斜至内水平面或规定高度的复合面,其作用是为进近面/起飞爬升面及FATO侧向提供附加障碍物保护。但在障碍物限制要求中,ICAO对不同运行类型进行了区分:精密进近FATO和非精密进近FATO要求设置过渡面;非仪表FATO则仅要求起飞爬升面和进近面。MH5013-2023延续了这一思路:精密进近、非精密进近、含目视航段面的PinS FATO设置起飞爬升面、进近面和过渡面;目视进近FATO则设置起飞爬升面和进近面。
因此,在ICAO/MH5013主线下,过渡面的必要性取决于运行方式和侧向保护需求,而不是无条件并入所有OLS。对于以目视运行为主的 eVTOL 起降场,核心仍是从 Safety Area 外边界或OFV顶面建立进近面和起飞爬升面;只有当运行方式、程序设计或安全评估需要侧向附加保护时,才应把过渡面纳入。中国团标提到“进近和起飞爬升面、过渡面起始端位于 OFV 顶面”,应理解为:当按所参照的MH5013运行类型需要设置过渡面时,其起始高度随 OLS 一起抬升至 OFV 顶面,而不是要求所有 eVTOL 场址一律设置过渡面。
FAA 路径不同。FAA EB105A 沿用 14 CFR Part 77 heliportimaginary surfaces,将 primary surface、approach/departure surface和 transitional surfaces 作为 VFR vertiport 空域面一并纳入,并规定过渡面以 2:1 从 primary surface 和 approach surface 侧边向外向上延伸。这反映的是美国Part 77空域评价制度的统一筛查逻辑,不应倒推为 ICAO/MH5013 主线下所有目视 vertiport 必须设置过渡面。
从工程推广角度看,过渡面应谨慎作为默认要求。对于当前以目视运行、垂直拉升和城市复杂净空为主要对象的eVTOL起降场,场址可行性的主控因素通常是控制障碍物、h0、OFV 以及进近面/起飞爬升面的方向和坡度。若默认强制设置过渡面,将扩大净空控制范围,增加三维建模和审查复杂度,提高周边障碍物穿透概率,并可能降低场址通过率;其安全收益未必与增加的工程复杂性相称。
因此,过渡面宜定位为按需设置项,而不是所有eVTOL起降场的默认组成。对于目视运行、无明显侧向程序且通过OFV和进近/起飞爬升面已能形成稳定越障保护的场址,可不把过渡面作为主控面;当运行程序包含侧向元素、仪表/PinS运行、复杂转弯或安全评估表明侧向保护不足时,再按ICAO/MH5013/EASA相应逻辑设置过渡面。这样既尊重传统heliport标准中关于过渡面的安全意图,又避免在eVTOL早期工程化推广阶段过度复杂化净空设计。
(四)传统OLS的合理性与局限
传统OLS的合理性在于其简单、稳定、可测量、可审查。只要场址具备开阔进离场走廊,监管部门和设计单位可以通过平面图、纵剖面图和障碍物测量快速判断是否满足净空要求。对于机场、郊区、低密度区域和具备开阔水面或河道方向的场址,传统OLS仍是最稳妥的基础方法。
但传统OLS的局限也非常明显。城市核心区和高密度建成区往往不存在完整低角度进离场走廊。如果机械套用传统OLS,许多屋顶起降场或交通枢纽起降点将因周边建筑穿透进近面/起飞爬升面而无法成立。eVTOL 具备一定垂直起降能力,标准体系因此开始考虑以受控垂直空间替代一部分低空长坡面,这就是OFV出现的根本原因。
四、OFV 几何构型:从二维斜面走向三维体积
(一)OFV的基本逻辑
OFV(Obstacle-Free Volume,无障碍体积或无障碍空间)的作用,是在起降场表面/FATO标高以上建立一个不得被障碍物穿透的三维体积,使eVTOL能够在受控空间内完成垂直起降、悬停、初始爬升或最终下降,再在较高位置接入进近面和起飞爬升面。这里应避免把 OFV 底面与传统 OLS 内边混为一谈:ICAO/MH5013 传统 OLS 内边由 Safety Area 外边界控制;团标 OFV 底面是为垂直拉升过程单独构造的保护底面。

注:OFV底面用于保护垂直拉升过程;传统OLS内边仍遵循ICAO/MH5013的安全区边界逻辑,抬高后位于OFV顶面。
图 8 OFV 几何构型:先垂直保护,再接入进离场面
因此,OFV并不是取消OLS,而是改变ICAO/MH5013 主线下 OLS 的起算高度。传统 OLS 的内边位置通常位于 Safety Area外边界或净空道端部;OFV 路线则先建立垂直拉升保护体积,再把传统 OLS 的起算高度抬升到 OFV 顶面,从 OFV 顶面引出进近面、起飞爬升面,并在运行类型需要时引出过渡面。
(二)EASA:性能化 OFV
EASA PTS-VPT-DSN 将 Chapter D 分为 OLS 和 OFV 两个子部分,这本身清楚说明EASA仍以ICAO传统OLS为基础,只是在复杂城市环境中增加OFV。EASA文件在总则中明确,其PTS基于 EASA ADR/CS-HPT-DSN、ICAO Annex 14 Volume II 和 ICAODocument 9261 Heliport Manual,并在 Chapter D 说明 Subpart 1 为Annex 14 和 Doc 9261 所提供的传统 OLS,Subpart 2 为 vertiport 建立OFV概念。其OFV不是固定尺寸几何体,而是从航空器飞行手册(AFM)或等效机型程序资料中的垂直起降程序参数推导,包括
h1、h2、TOwidth、TOfront、TOback、FATOwidth、FATOfront、FATOback、θapp、θdep 等。该思路在成熟机型和资料完备条件下有价值,但不宜作为我国起降场选址和净空论证的前置依赖。
PTs VPT-DSN.D.455 Obstacle-free volume (OFV)
(a) The obstacle-free volume, as depicted in Figure D-15, is created by extending vertically upward the outside edges of the SA up to height h1. The edges at height h1 are then extended upwards linearly up to height h2 to provide a funnel-shaped volume. At height h2, 0.5 D are added on each side of the VTOL procedure volume so that the dimensions of the obstacle-free volume at height h2 are:
(1) the length $( \mathsf { T O } _ { \mathsf { b a c k } ^ { + } } 0 . 5 \mathsf { D } )$ behind the aircraft and the length $( \mathsf { T O } _ { \mathsf { f r o n t } } + \mathsf { O } . 5 ~ \mathsf { D } )$ in front of the VTOL-capable aircraft, referenced to the aircraft centre of the smallest enclosing circle when positioned on the FATO; and
(2) the width $( \mathsf { T O } _ { \mathsf { w i d t h } } + 1 \mathsf { D } )$
(b) The obstacle-free volume should not be penetrated by obstacles.
Note: A larger SA may be warranted for specific local conditions, e.g. severe aerology.

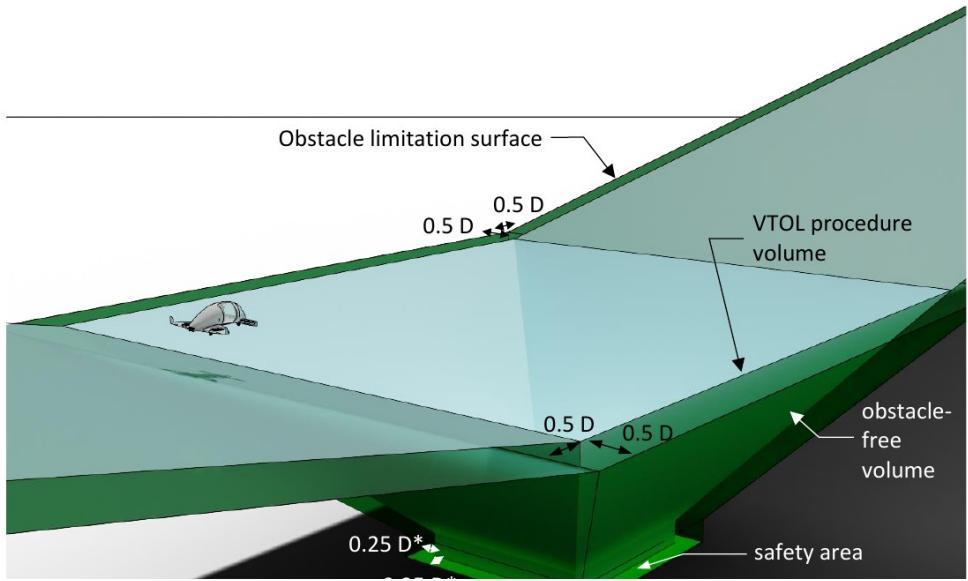
图 9 EASA PTS-VPT-DSN Figure D-15:由垂直起降程序体积建立 OFV
需要特别指出,EASA在传统OLS部分实际上选择了“visual$\mathrm { F A T O s ^ { \prime \prime } }$ 的构型路径。PTS-VPT-DSN 的适用范围是 VFRvertiports,Chapter D 的 Table D-1 标题即为“Dimensions andslopes of OLSs for all visual $\mathrm { F A T O s ^ { \prime \prime } }$ 。这意味着 EASA 并未把仪表直升机场那套完整复杂 OLS 体系直接搬入 vertiport,而是在
ICAO/Doc 9261 传统 OLS 基础上,面向 VFR vertiport 保留进近面和起飞爬升面作为核心,并把过渡面处理为按需项。
(g) The issues involved with such deviations from the basic configurations are:
(1) where the inner edge should be located; and
(2) the shapes and sizes of the shaded areas may vary considerably.
(h) To identify the shaded areas, if any, it is necessary to consider their side edges as extending from the ends of the inner edge to points where they meet the tangent of the reference circle at right angles to the centre line of the surface. The shaded areas willthen be bounded by these side edges, the inner edge and the edges of the SA.
(i) Where the FATO is elongated, there should be two reference circles within the SA, each located at the appropriate approach end of the SA (see Figure D-4).

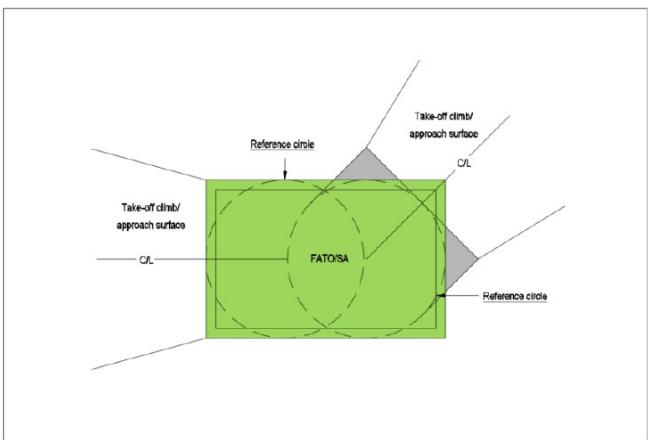
Figure D-4. Rectangular FATO with two reference circles and surfaces separated by 135°
(j) Where a clearway has been established, the shaded area should be between the FATo/SA and clearway (see Figure D-5); the inner edge of the approach or take-off climb surface willabut the clearway.

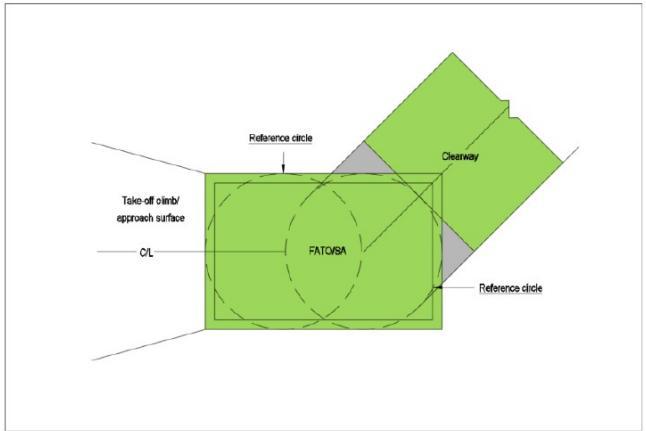
Figure D-5. Rectangular FATO with two reference circles and helicopter clearway
图 10 EASA Table D-1:all visual FATOs 的 OLS 尺寸和坡度
其依据主要有三点:第一,EASA PTS本身限定为VFRvertiports,服务载人、增强类别 VTOL 航空器;第二,城市复杂障碍物环境下,直线低空长坡面常常不可行,因此EASA在D.405中明确提出可通过曲线航迹或抬高进近/起飞爬升面起点解决;第三,EASA 在 D.410 中仍保留 ICAO 逻辑,进近面内边为FATO 最小规定宽度加 Safety Area,位置位于 Safety Area 外边界或参考圆外边界,并且明确进一步指导来自 ICAO Doc 9261。
| SURFACE AND DIMENSIONS | SLOPE DESIGN CATEGORIES | ||
| A | B | C | |
| Outer width | N/A | (b) | N/A |
| Total length from inner edge (a) | 3 386mc | 1075m^ | 1220m^ |
| TRANSITIONAL SURFACEd: | |||
| Slope: | 50% | 50% | 50%(1:2) |
| (1:2) | (1:2) | ||
| Height: | 45m | 45m | 45m |
Table D-1. Dimensions and slopes of OLSs for allvisual FATOs
| PTS VPT-DSN.D.410Approach surface |
(a) Applicability
The purpose of the approach surface is to protect a VTOL-capable aircraft during the final approach to the FATo by defining the area that should be kept free from obstacles to protect a VTOL-capable aircraft in the final phase of the approach-to-land manoeuvre.
(b) Description
An incline plane or a combination of planes or, when a turn is or turns are involved, a complex surface sloping upwards from the inner edge and centred on a line passing through the centre of the FATO.
图 11 EASA D.410:进近面内边与 Safety Area/参考圆关系
对过渡面,EASA的处理也说明其并非默认全面套用仪表直升机场OLS。D.415明确写明:过渡面的目标是在verticalprocedures include lateral transit 时提供保护空域;适用性为 whereappropriate,可在 VFR vertiports 中为含 lateral transit 的垂直程序提供。Table D-1脚注亦明确:当VTOL程序包含侧向元素时,transitional surface may be provided。因此,EASA 传统 OLS部分的真实逻辑是“VFR 目视场址 + 进近/起飞爬升面为核心 +过渡面按侧向程序需要提供”。

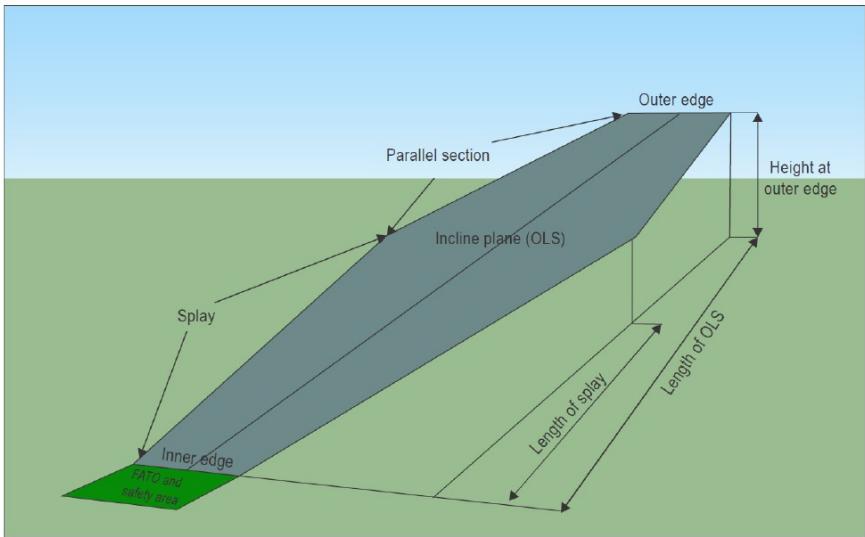
Figure D-6. Generic approach/take-off climb surface
(c) Characteristics
(1) The limits of an approach surface should comprise:
(i) an inner edge, horizontal and equal in length to the minimum specified width of the FATO plus the SA, perpendicular to the centre line of the approach surface and located at:
(A) for a runway-type FATO, the outer edge of the SA; or
(B) for other than a runway-type FATO, the outer edge of the reference circle;
(ii) two side edges originating at the ends of the inner edge and diverging uniformly at a specified rate from the vertical plane, containing the centre line of the FATO to a specified width and continuing thereafter at that width for the remaining length of the approach surface; and
(ii) an outer edge horizontal and perpendicular to the centre line of the approach surface at a specified height above the elevation of the FATO.
(2) The elevation of the inner edge should be the elevation of the SA at the point on the inner edge that is intersected by the centre line of the approach surface. When safety assessment determines that it would not adversely affect the safety or significantly affect the regularity of operations of VTOL-capable aircraft at vertiport, the origin of the inclined plane may be raised directly above the FATO.
(3) The slope(s) of the approach surface should be measured in the vertical plane containing the centre line of the surface.
(4) In the case of an approach surface involving a turn, the surface should be a complex
图 12 EASA D.415:过渡面用于含 lateral transit 的垂直程序
EASA的开创性贡献在于明确提出OFV概念:在城市复杂净空条件下,仅依靠传统低空长坡面的OLS难以支撑vertiport布点,需要在起降场上方设置无障碍体积,以保护eVTOL垂直起降和垂直拉起阶段。这个概念本身非常有创意,也非常实用,是vertiport 标准区别于传统 heliport 标准的关键突破之一。但 OFV 如何构型,仍值得商榷。EASA方法将OFV较深地绑定于机型程序参数,能够反映不同 eVTOL 构型、控制律、垂直程序和爬升能力差异;但其核心问题在于:如果把垂直程序高度或上部程序体积处理成相对固定、预设或通用化的要求,就很难被eVTOL本身所接受。eVTOL确有垂直拉起能力,但垂直拉起不是免费的安全裕度,而是直接消耗电能、影响航程、热管理、周转效率和商业载荷。更重要的是,现阶段多数 eVTOL 航空器并不具备类似传统航空器那样成熟、统一、可直接用于场址净空设计的飞行手册资料;若在标准逻辑中保留“再看AFM/厂家手册”的活口,容易导致选址阶段无法闭合、审查依据不稳定。也不应要求每个厂家、每个机型都额外生成一套数据去迎合场地标准中的OFV概念。对制造商和运营人而言,真正合理的高度不是固定高度,也不是等待手册确认的高度,而是“必须拉起的高度”。中国团标 h0 的价值正在于此:h0 不是预设高度,也不是随具体机型变化的造型参数,而是由场址周边控制障碍物反算出的、为使传统OLS能够设定并越障所必需的垂直拉起高度。建设完成的起降场应服务于最大使用机型及其以下的全部适用机型,不能换一型航空器就重做一套OFV造型,因此h0首先是环境参数和场址参数。
(三)CASA:工程建模友好的 FPA/VPS/OFV 表达
CASA AC139.V-01 大体继承 EASA 思路,但将几何关系表达为 FPA、VPS 与 OFV:FPA 是 FATO Protection Area,VPS 是Vertical Procedure Surface,OFV 是二者之间的无障碍体积。该表达方式对三维建模、GIS净空分析和方案展示更友好。

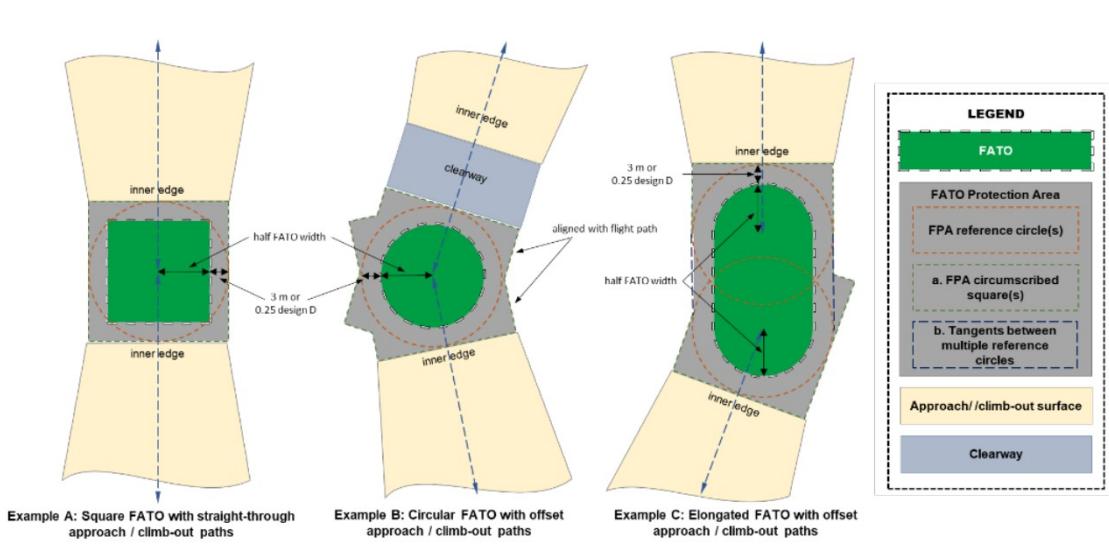
Figure 7 - Protection surfaces for vertiports without vertical procedures
4.2.3 Vertical Procedure Surface
4.2.3.1 A vertical procedure surface (VPS) should be established for where vertical procedures are used for landing or take-off from the vertiport.
4.2.3.2 The VPS is a surface that encompasses the area bordered by a circumscribed square(s) aligned with the intended aircraft flight path(s) centred on the VPS reference circle, as shown in Figures 8, 9 and 11.
4.2.3.3 A VPS should be free of obstacles.
4.2.3.4 A VPS reference circle should be established above and centred on the FATO.
4.2.3.5 The diameter of a VPS reference circle should be the diameter of the associated FPA reference circle, plus 1 Design D per 100 ft increase in height above the FATO.
4.2.3.6 The vertiport operator should determine the elevation of the VPS subject to the performance characteristics of the most demanding VCA intended to use the vertiport or the VCA operator's intended operational requirements.
4.2.4 Obstacle Free Volume (OFV)
4.2.4.1 An OFV should be established between a VPS and the associated FPA.
4.2.4.2 An OFV should be free of obstacles.
4.2.4.3 The OFV is a truncated cone extending between the edge of the FPA reference circle to the edge of the VPS reference circle, as shown in Figure 8, 9 and 11.
图 13 CASA AC139.V-01 关于 FPA、VPS、OFV 的文字定义摘录

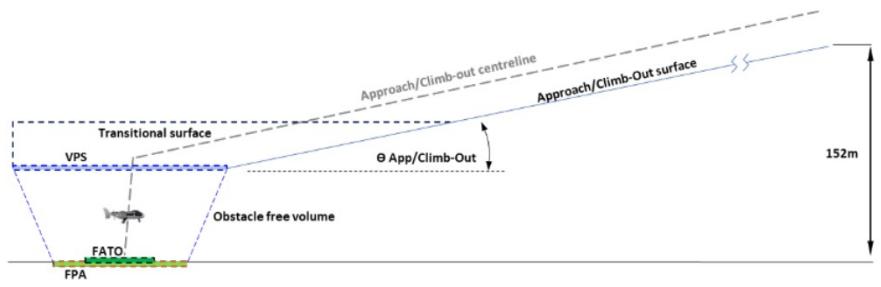

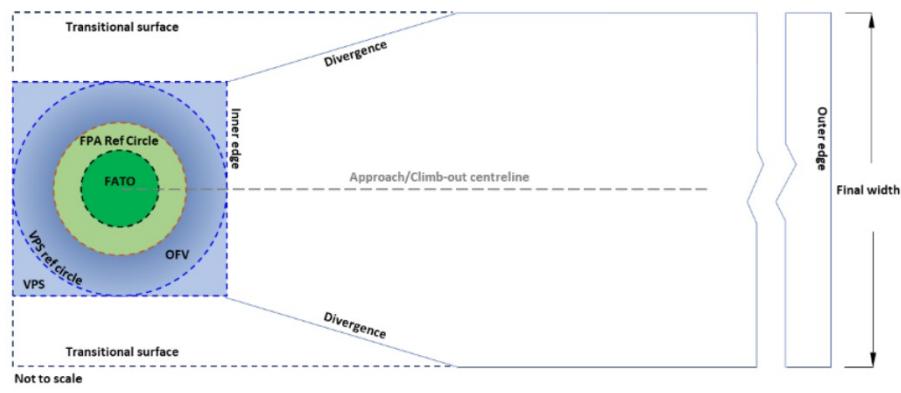
Figure 8 - An example OLS design for a vertiport accommodating vertical procedures

图 14 CASA AC139.V-01 关于 OFV 及相关面的示意图摘录
CASA的价值在于把“城市复杂净空”从二维剖面问题转化为三维体积问题。对于屋顶起降场、高架平台和城市交通枢纽,这种方式比单纯画进近剖面更接近实际审查需求。
(四)中国团标:严格延续 heliport OLS,并以 h0+OFV 衔接 eVTOL 垂直拉起能力
中国团体标准 T/CCAATB 0062-2024 采用“净空良好”和“净空复杂”二元结构,但其底层逻辑始终是传统 heliportOLS。净空条件良好时,直接参照MH5013,以eVTOL最大全尺寸D代替直升机最大旋翼直径;净空条件复杂时,并不是放弃OLS,而是先设置悬停高度h0及相应OFV,再把进近面、起飞爬升面,以及按运行类型需要设置的过渡面的起始端抬升到OFV顶面。换言之,OFV是传统OLS的抬升连接件,不是替代OLS的独立体系。

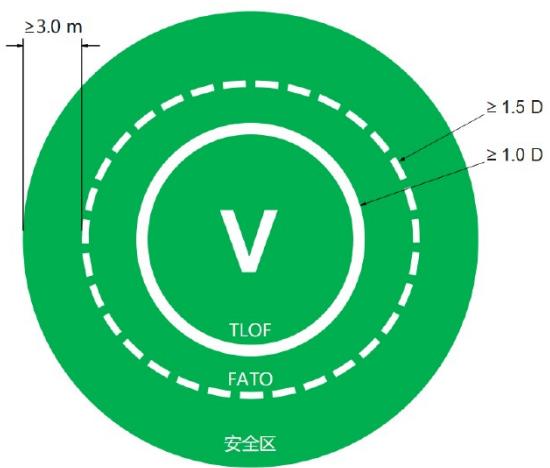
图5.4-1FAT0、TLOF和安全区场地物理特性示意图
5.5机位
5.5.1机位的尺寸和形状应满足eVTOL起降场设计机型在停放时,eVTOL 的垂直投影均包含在机位中。
5.5.2 机位形状为圆形,其尺寸应少能够内切个设计机型1.2D的圆,机位与机位之间的间距应少为2.0m。
5.5.3机位上宜设置满eVTOL停放所需的系留设施。
5.6地面滑行道
5.6.1 在机位与机位之间、机位与机库之间应设置地滑道。
5.6.2地面滑行道应能承受eVTOL移动时的运行荷载。
5.6.3 地滑通道的宽度应不于eVTOL起落架宽度或eVTOL转运装置最轮外侧间距的2倍。
6障碍物限制
6.1净空条件良好时
6.1.1在空域环境良好时,eVTOL起降场障碍物限制面宜参照MH 5013《民用直升机场飞行场地技术标准》中的规定,并以eVTOL最大全尺寸D代替直升机最大旋翼直径。进近和起飞爬升面内边宽度为FATO加安全区的宽度,内边位置为安全区边界。
6.1.2eVTOL起降场宜少设置两个进近/起飞爬升,中线夹宜不于135°。
6.2净空条件复杂时
6.2.1当场址周边净空条件复杂,或参照MH5013《民用直升机场飞行场地技术标准》设置障碍物限制面无法满足净空要求时,宜考虑设置悬停高度(以ho表示)及相应的无障碍空间(OFV)。进近和起飞爬升面、过渡面起始端位于无障碍空间顶面,其他参数宜参照MH5013《民用直升机场飞行场地技术标准》设置。
6.2.2悬停高度的设置应根据周边航路上的障碍物及eVTOL 的飞行性能确定。
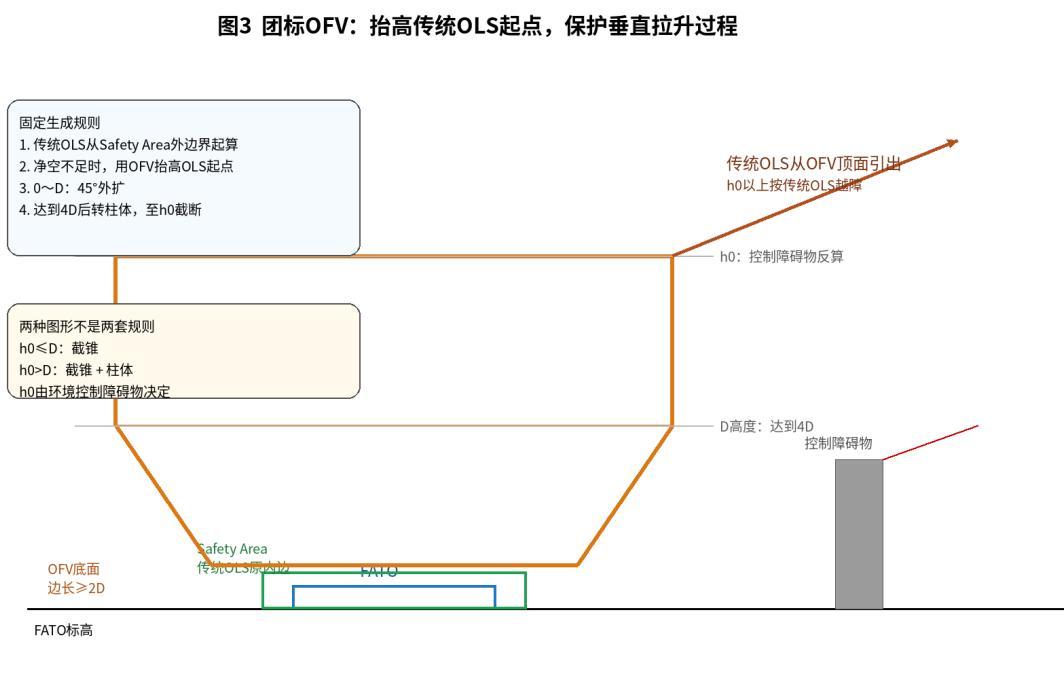
例:以正形FAT0为例,悬停度h0≤D时的障碍限制意图见图6.2-1,悬停度h0>D时的障碍限制面示意图见图6.2-2。
图 15 中国团标关于 h0≤D 和 h0>D 两种 OFV 构型的图示
团标中,h0≤D 时,OFV 底面为 FATO 标高处边长至少 2D 的正方形,顶面为h0高度处边长至少2×(D+h0)的正方形;h0>D时,顶面边长至少4D,D高度以下为 $4 5 ^ { \circ }$ 外扩面,D高度以上为竖直面。这里的h0不是抽象的经验高度,也不是为了追求“越高越安全”的保守值,而是由周边控制障碍物决定的、为使传统OLS能够从OFV顶面顺利建立并满足越障要求所需的垂直拉起高度。 $4 5 ^ { \circ }$ 外扩面并非任意设定,其来源可追溯至直升机场标准中的侧向保护斜面。ICAO Annex 14 Volume II 规定,高架直升机场FATO 安全区边缘应设置以 $4 5 ^ { \circ }$ 向外上升、水平延伸至 10m 的protected side slope;MH5013-2023 第 4.4.1 条亦规定,FATO 安全区周围侧向保护斜面自安全区边界起向上向外以 $4 5 ^ { \circ }$ 角延伸至距安全区边界10m远,且该斜面上不应有突出障碍物。团标将这一heliport 源头中的 $4 5 ^ { \circ . }$ 侧向保护逻辑移植到 eVTOL 垂直拉起空间:h0≤D时,每上升h0即向每侧外扩 $\mathrm { h 0 }$ ,顶面边长由2D变为2(D+h0);h0>D 时,先按 $4 5 ^ { \circ }$ 外扩至D高度,形成4D顶面尺度。若D以上仍继续按 $4 5 ^ { \circ }$ 外扩,顶面边长将超过4D,OFV会随h0线性膨胀,城市起降场将被过度放大。参考EASA对垂直程序体积设置上限、避免无约束外扩的思路,团标在达到 4D 后不再继续扩大,而是转为竖直柱体,将D以上空间理解为保持既有侧向保护边界内的垂直拉起段。

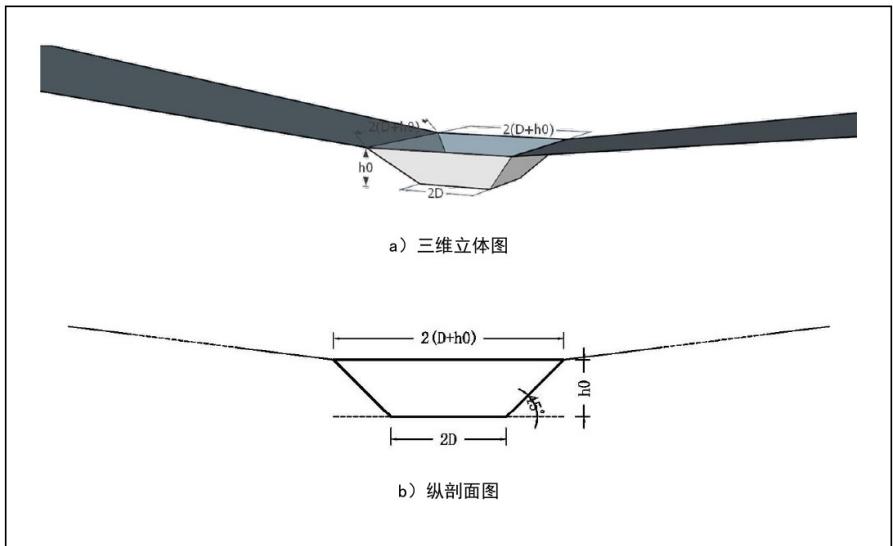
图16 中国团标关于圆形FATO与OFV的补充说明摘录
因此,团标的关键不是“简化OFV”本身,而是把eVTOL可垂直拉起的能力工程化为一个具体、明确、可由障碍物反算的h0。eVTOL能够垂直拉起,但垂直段耗能高,不宜任意抬高;h0应取满足控制障碍物越障和传统OLS设定的必要高度。这里必须强调,h0 由场址环境决定,而不是由单一机型决定;最大使用机型确定D和场地基准尺度后,场地应覆盖该最大使用机型以下的全部机型,不能因机型更换而改变 OFV 基本造型。机型垂直爬升性能、能耗、定位误差、失效工况、风环境及下洗/外洗影响用于校核运行适用性和限制条件。
五、FAA 路线:Part 77 面、D/RD 与 DCA
(一)FAA EB105A 未采用 EASA 式 OFV
FAA EB105A 与 EASA/CASA/中国团标的最大区别,是没有把 OFV 作为核心障碍物保护概念。FAA 明确将 14 CFR Part 77 中适用于 heliport 的 imaginary surfaces 用于 vertiport,包括 primarysurface、approach surface 和 transitional surfaces。
Figure 2-5: VFR Vertiport Approach/Departure Surfaces

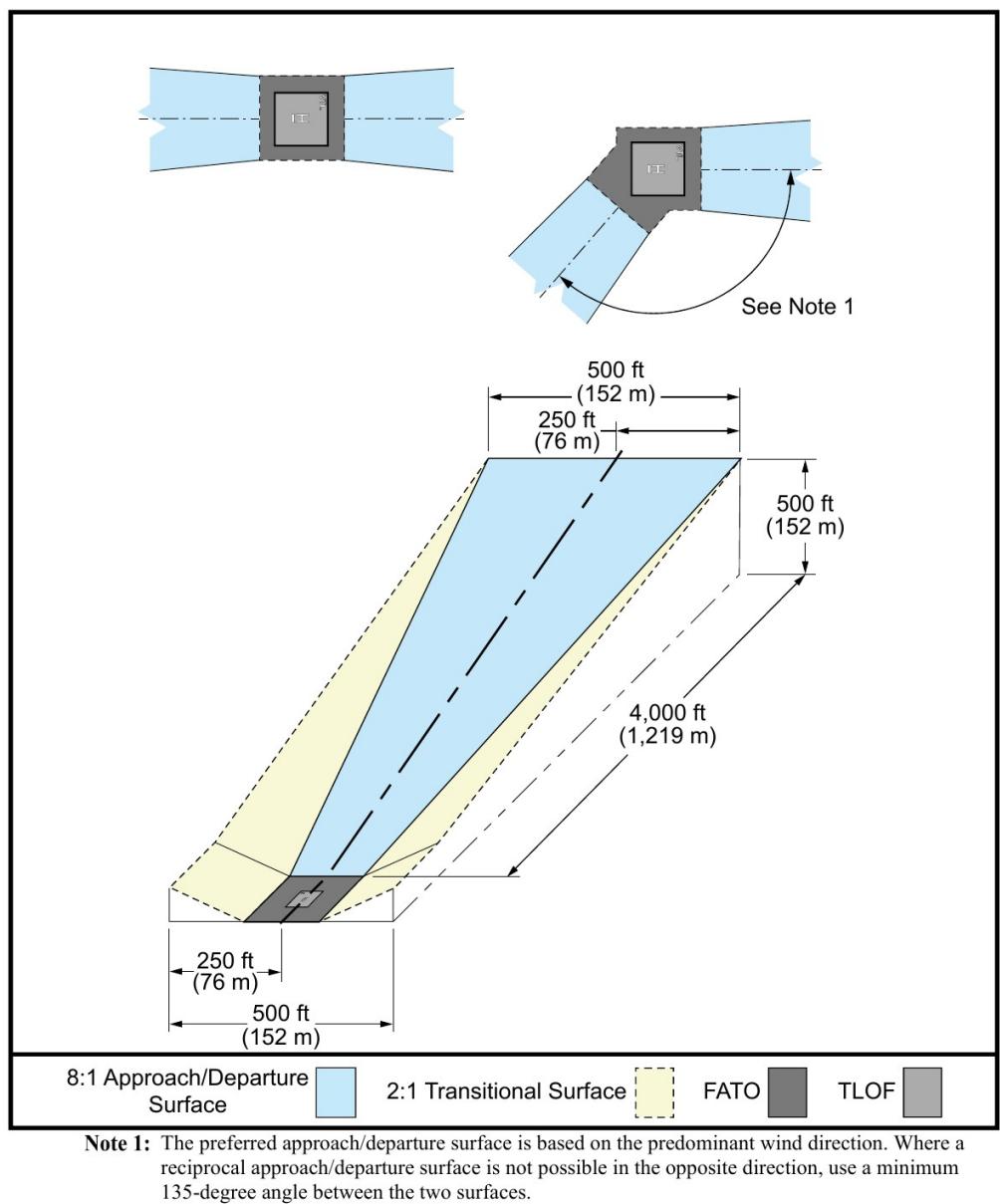
图 14 FAA EB105A Figure 2-5:VFR Vertiport 进近/离场面
作为旁支参考,FAA 的 VFR 几何参数非常明确:在 FAAEB105A/Part 77 语境下,primary surface 等同FATO;approach/departure surface 从 FATO 边缘起算,长度 4000ft(1219 m),外端宽 500 ft(152 m),坡度 8:1;transitionalsurface 从 primary surface 和 approach surface 侧边向外向上延伸,坡度 2:1,水平距离 250 ft(76 m)。该表述仅适用于 FAA 路径,不应反推到 ICAO/MH5013 主线。
Figure 2-6: VFR Vertiport Curved Approach/Departure and Transitional Surfaces

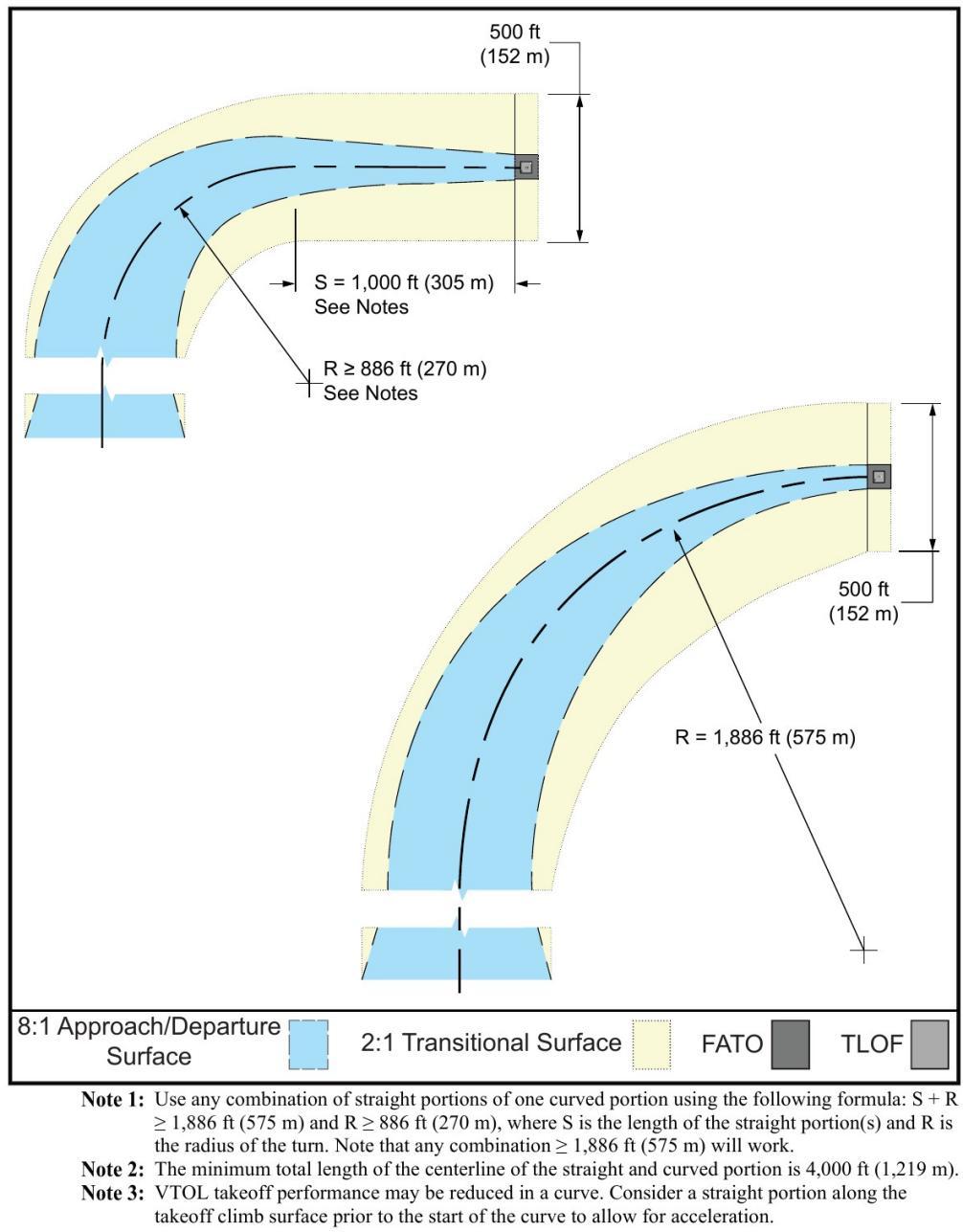
图 15 FAA EB105A Figure 2-6:曲线进近/离场面
曲线进离场方面,FAA 要求 S+R≥1886 ft(575 m),R≥886ft(270 m),中心线总长度不小于 4000 ft(1219 m)。这与
ICAO/MH5013 关于曲线段半径的底层逻辑相通,均体现“转弯前需有足够直线加速和稳定空间”的思想。
(二)FAA 把 eVTOL 差异主要放在 D/RD 和 DCA
FAA 并非忽略 eVTOL 差异,而是将差异分配到另两个概念中:一是 D/RD 尺寸体系,二是 DCA 下洗/外洗警戒区。EB105A中,D为航空器整体外廓,RD为产生升力的推进单元及起落架/接地点包络。TLOF 按 1RD,FATO 按 2RD,Safety Area 按2.5D。
-
Battery system: Comprised of the battery, the battery charger, and any protective, monitoring, and alerting circuitry or hardware inside or outside of the battery. It also includes vents (where necessary) and packaging.
-
Controlling dimension (D): The diameter of the smallest circle enclosing the entire VTOL aircraft projection on a horizontal plane, including all possible configurations with rotors/propellers turning, if applicable. See Figure 1-1.
Figure 1-1: Controlling Dimension

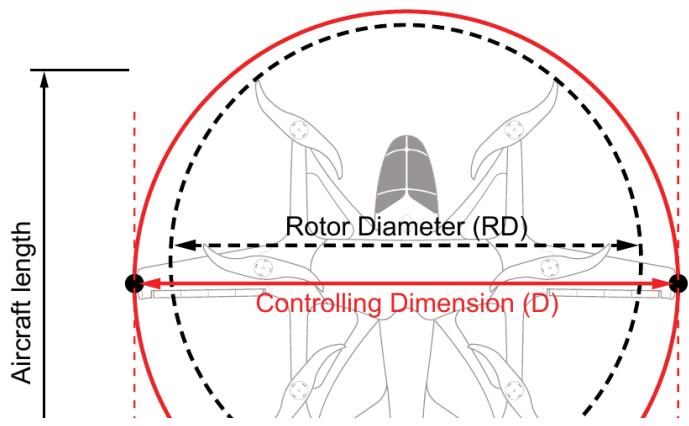
图 16 FAA EB105A 关于 D 与 RD 的定义图示
DCA(Downwash/Outwash Caution Area)用于保护人员、设施和财产免受eVTOL下洗/外洗影响。当风速可能达到或超过34.5 mph(55.5 kph)时,应设置 DCA。FAA 路线体现为:空域障碍物仍按Part 77面评价,eVTOL新增地面风场风险则用DCA单独控制。
六、FAA 与 ICAO/EASA/CASA/中国体系的核心差异
图4ICAO/EASA/CAAC主线与FAA参考路径

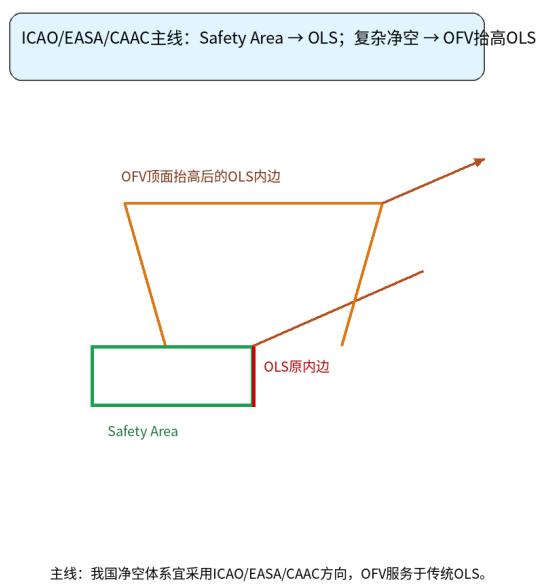

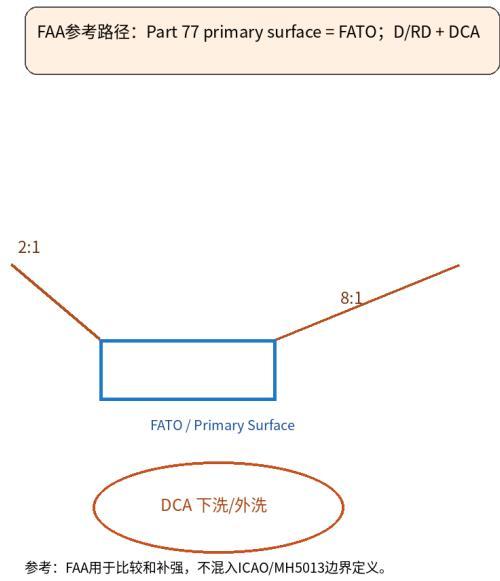
图 17 FAA 路线与 ICAO/EASA/CASA 路线的几何差异
| 比较维度 | FAA EB105A 路线 | ICAO/EASA/CASA/中国路线 | 工程含义 |
| 障碍物保护主模型 | Part 77 imaginarysurfaces, primary/approach/transitionalsurfaces | 传统OLS 基础上发展OFV,复杂净空下先建立三维保护体积 | FAA更统一、保守;OFV路线更适应城市复杂场景 |
| 进离场起点 | FAA/Part 77语境下通常从FATO/primarysurface边缘起算 | ICAO/MH5013传统OLS 从 Safety Area外边界或凈空道端部起算;OFV场景从OFV顶面起算 | 两套体系起算边界不同,不能混用 |
| 城市高密度适应性 | 主要依赖8:1面和航行研究,缺少 OFV替代几何 | 用OFV 解决垂直段保护,再接入OLS | OFV更有利于屋顶、高架和CBD场址 |
| eVTOL特殊性处理 | D/RD尺寸分离,DCA控制下洗/外洗 | EASA为机型资料参数化OFV;中国团标为控制障碍物反算h0 | FAA关注尺寸和风场;中国团标关注净空闭合和工程可审查 |
| 并衔接 OLS | |||
| 项目前期可操作性 | 参数明确,但城市净空可能较难满足 | EASA依赖机型手册或程序资料,前期闭合困难;中国团标不把AFM作为前置条件 | 国内宜以传统OLS 有效为前提,用h0解决净空闭合 |
由此可见,FAA 与 ICAO/EASA/CASA/中国体系的差异不是“安全程度”的差异,而是“安全空间如何组织”的差异。FAA保持传统空域面的一致性;EASA/CASA/中国则接受城市起降场需要新的三维无障碍体积。
七、几何构型合理性评估
(一)传统 OLS 的适用边界
传统OLS适用于航空器沿较明确、较低角度进离场路径进入和离开的场址。其优势是规则清晰、审查成熟、长期保护性强;劣势是在城市核心区容易与既有建筑冲突。适用场景包括机场内vertiport、郊区地面起降场、低密度园区、具备水面或开阔廊道的场址。
(二)OFV 的适用边界
OFV适用于垂直段能力对场址可行性具有决定作用的场景。其优势不是简单“减少 OLS”,而是把传统 OLS 起点从地面 SafetyArea外边界对应的低标高抬升到一个由控制障碍物决定的高度,使eVTOL只垂直拉起到必须高度h0,再按传统OLS逻辑进出。这样既利用了eVTOL可垂直拉起的能力,又避免把垂直段设计成固定的、过度耗能的通用高度。劣势是对机型性能、能耗、控制系统、程序设计和运行批准依赖更强。适用场景包括城市屋顶、
高架交通枢纽、建筑密集区起降点和传统OLS难以满足的复杂净空场址。
(三)中国团标 OFV 的合理性和不足
中国团标以D和h0构造OFV,但不能把它理解为对MH5013/Heliport Manual 的弱化或替代。其合理性在于:第一,严格保留传统OLS作为最终越障审查框架,即便偏保守也保持有效和可审查;第二,承认eVTOL具有垂直拉起能力;第三,用OFV把垂直拉起段与传统OLS衔接;第四,h0由周边控制障碍物反算确定,是环境决定的场址参数,而不是交给单一机型、尚不成熟的 AFM 或厂家手册决定,使净空复杂场址能够进行具体、明确、闭合的工程计算。
需要补充的是,h0不宜按固定经验高度套用,也不宜为了净空审查无限抬高。垂直拉起意味着能耗增加和运行效率降低,过高的h0可能牺牲航程和商业可行性;过低的h0则无法从OFV顶面建立合规OLS或无法越过控制障碍物。实际工程中应以障碍物穿透分析反算 h0,使其成为“必须拉起高度”。机型资料、运行程序、失效工况、DCA和风环境分析可作为校核和运行限制依据,但不应成为确定h0和建立净空框架的前置活口。
八、实施难点与标准宣贯重点
(一)叫好不叫座的根本原因
近两年eVTOL起降场标准研究较多,但真正落地实施的项目有限,原因复杂,其中一个重要原因是净空逻辑难以被非机场工程背景主体理解。场址方、航空器厂家、运营人、规划部门和审批部门往往关注点不同:场址方关心用地和建设边界,航空器厂家关心垂直起降能力和能耗,运营人关心航程和周转效率,审批部门关心可审查、可追责、可长期管控的空间边界。
传统OLS本身就不容易被新型航空器厂家接受。厂家容易从“航空器能飞”出发,认为eVTOL具备垂直起降、自动控制和精准定位能力,因此不应再受传统进近面、起飞爬升面以及必要的过渡面约束。但从基础设施和监管角度看,OLS并不是因为航空器不能垂直飞行才存在,而是为了给长期运行中的进离场、越障、偏差、风影响、失效处置和责任边界提供稳定、可测量、可审查的空间框架。
(二)不能把场地标准变成厂家数据负担
如果OFV构型高度依赖每个厂家、每个机型提供的垂直程序参数,就会把基础设施净空问题转嫁给航空器厂家。现阶段多数eVTOL 机型仍处于研发、试飞、适航取证和构型迭代过程中,飞行手册、运行程序、控制律、软件版本、电池与热管理能力都可能变化。要求每个厂家为每个机型额外形成一套数据来迎合OFV概念,会导致场地几何不稳定、审批依据不稳定、项目投资风险增加。
起降场是城市基础设施,应先形成稳定的净空几何框架。机型数据可以用于运行适配、可用机型标注和限制条件制定,但不应成为场地几何成立的前置条件。否则,换一个机型或软件版本就可能触发OFV重算、净空重审和工程方案调整,这与基础设施批量复制和网络化铺开相冲突。
(三)团标逻辑需要被翻译成工程语言
团标逻辑严密,但直接用OLS、OFV、h0、D、侧向保护斜面等术语解释,外部主体不易理解。更有效的表达应从问题出发:城市复杂场址并不是没有地方起降,而是很多场址无法从地面 Safety Area 外边界直接建立传统 OLS。eVTOL 的价值在于可以垂直拉升,因此可以先把航空器拉升到一个能够建立传统 OLS 并越障的高度。这个必须拉升的高度就是 h0。
h0以下的垂直拉升过程同样需要保护空间,这个空间就是OFV。OFV构型不应复杂化,而应延续heliport已有的45°侧向保护斜面逻辑:先按 45°外扩至 4D,再以 4D 柱体向上延伸;h0 落在D以下时表现为截锥,h0超过D时表现为截锥加柱体。两种图形不是两套规则,而是一套固定生成规则在不同控制障碍物高度下的截断结果。
(四)面向实施的宣贯表述
建议后续宣贯时采用如下表述:eVTOL不是不需要净空,而是可以用垂直拉升把传统净空面的起点抬高。h0 就是为越过周边控制障碍物所必须抬高的高度。h0 以下用 OFV 保护垂直拉升过程,h0 以上仍按传统 OLS 控制进离场。这样既不放弃直升机场成熟净空逻辑,也不浪费 eVTOL 的垂直能力。
这一表述有助于统一各方认识:对监管部门而言,传统OLS仍然有效,审批逻辑没有断裂;对厂家而言,不要求其为每个机型重新生成一套场地几何参数;对业主而言,场地按最大使用机型和控制障碍物形成稳定边界,建成后通过可用机型标注和运行限制管理适用范围;对设计单位而言,净空论证可以转化为控制障碍物识别、h0反算、OFV构型和OLS衔接四个可操作步骤。
九、国内工程应用建议
(一)建立“双路径净空校核”
建议国内eVTOL起降场项目建立双路径校核机制:净空良好场址采用 MH5013/ICAO 传统 OLS 路径;净空复杂场址仍采用MH5013/ICAO 传统 OLS 作为最终越障框架,但先按中国团标建立 h0+OFV,将 OLS 起点抬升至 OFV 顶面。这样既保持 heliportmanual 的源头一致性,又体现 eVTOL 可垂直拉起的机型特性。
(二)把h0作为专项论证参数
h0不宜作为任意工程假定值,更不应被理解为固定标准高度。其本质是“为使传统OLS能够设定并越过周边控制障碍物,eVTOL 应先垂直拉起的必要高度”。计算上应先识别控制障碍物,确定传统 OLS 方向和坡度,再反算从何高度引出 OLS 可以满足越障。该高度由净空几何闭合决定,属于场址环境参数。航空器垂直爬升性能、能耗、失效后飞行能力、定位误差、控制精度、风环境和运行程序用于验证该高度是否可运行、是否需附加限制,而不用于替代净空几何判断。对城市屋顶场址,h0往往是决定项目能否成立的核心参数。
从场地供给角度看,起降场不是为某一架航空器临时生成的几何体,而是面向设计最大使用机型建立的基础设施。只要航空器不超过最大使用机型控制尺度,就应在同一场地净空框架下使用。因此,D用于确定最大使用机型下的底面和保护尺度,h0用于反映场址周边控制障碍物所要求的垂直拉起高度;二者共同形成稳定的场址几何,而不是随每个具体机型重新生成。
(三)引入 FAA 的 RD 和 DCA 作补充校核
建议在国内标准框架下吸收FAA EB105A的两个有价值概念:RD 用于更准确描述推进器及接地点包络,避免单一 D 值过
粗;DCA 用于下洗/外洗风场风险控制,避免仅以 Safety Area 或OFV投影判断地面安全。
(四)形成标准化图纸成果
后续项目应至少形成七类图纸:FATO/TLOF/Safety Area 平面图,传统 OLS 平面图和纵剖面图,OFV 三维图和剖面图,h0≤D与 h0>D 构型图,FAA 8:1/2:1 对照图,DCA 与 Safety Area/OFV叠合图,周边障碍物穿透分析图。
十、结论
第一,Vertiport 障碍物限制的源头是 ICAO 直升机场标准体系。FATO、TLOF、Safety Area 和 OLS 构成全部后续标准的共同骨架;其中 FATO 是运行核心,TLOF 是接地/离地区,SafetyArea是传统进近面和起飞爬升面内边的关键起算边界。
第二,传统 OLS 几何构型适合开阔进离场场景,但在城市高密度环境中存在明显局限。OFV的出现,是为了让具备垂直程序能力的eVTOL先在受保护空间内上升或下降,再接入进近/起飞爬升面。
第三,EASA的开创性在于提出OFV概念,这一点应充分肯定;但其具体构型方式,特别是对固定或预设高度、机型手册/程序资料的依赖,容易与eVTOL能耗约束、场地基础设施通用性和现阶段资料不完备现实发生冲突,因此值得商榷。CASA的FPA/VPS/OFV最适合工程建模;中国团标的h0+OFV不是简单的固定几何简化,而是把“控制障碍物决定必须垂直拉起高度、OFV衔接传统OLS”这一思路工程化,最适合国内复杂净空场址的具体论证。
第四,FAA EB105A 与 EASA/CASA/中国路线存在根本差异。FAA 不采用 OFV 作为核心障碍物保护概念,而是沿用 Part 77imaginary surfaces,并以 D/RD 和 DCA 处理 eVTOL 尺寸与下洗/外洗风险。
第五,国内工程实践应以 ICAO/Heliport Manual/MH5013 一脉相承的传统OLS为主线,以中国团标h0控制障碍物反算OFV为复杂净空补充机制;同时借鉴 FAA 体系在 D/RD 区分、Part 77 空域评价和DCA下洗/外洗风险控制方面的有益经验。该方法不是排斥 FAA,而是明确主线与参考的关系:净空体系以 ICAO 系为主,FAA成果用于补强eVTOL特殊风险识别和工程校核。其核心不是为每个机型生成不同OFV,而是按最大使用机型确定D、按控制障碍物确定 h0,形成稳定场地几何,并向下包容较小机型;建成后通过标注可用机型和运行限制管理适用范围。
附件:核心标准资料
ICAO Annex 14 Volume II — Heliports。
ICAO Doc 9261 Heliport Manual, Fifth Edition, 2021。
FAA Engineering Brief No.105A, Vertiport Design, 2024。
FAA AC 150/5390-2D, Heliport Design。
EASA PTS-VPT-DSN, Prototype Technical Specifications for Vertiport Design。
CASA AC139.V-01, Guidance on Vertiport Design, 2023。
T/CCAATB 0062-2024《电动垂直起降航空器起降场技术要求》。
MH5013-2023《民用直升机场飞行区技术标准》。