报告草稿
Vertiport障碍物限制几何构型研究报告(草稿)
一、研究目的与方法
本报告围绕 eVTOL 起降场(Vertiport)障碍物限制的几何构型开展研究,重点不是简单罗列各标准条文,而是从 heliport 标准源头出发,分析其几何逻辑如何演化为 vertiport 的 OLS 与 OFV,并评估不同标准体系的合理性和适用边界。
本报告采用“源头追溯、几何拆解、体系对比、工程评估”的方法:
- 从 ICAO Annex 14 Volume II 和 ICAO Doc 9261 追溯 FATO、TLOF、Safety Area、OLS 的源头逻辑。
- 对比中国 MH5013-2023、FAA AC150/5390-2D 等 heliport 母体标准。
- 分析 EASA PTS-VPT-DSN、CASA AC139.V-01、中国 T/CCAATB 0062-2024 和 FAA EB105A 在 vertiport 场景下的几何变形。
- 重点区分 FAA 路径与 ICAO/EASA/CASA/中国路径的不同。
- 用插图解释几何关系,避免仅用文字描述导致误解。
二、源头:Heliport标准中的基本几何构型
(一)FATO、TLOF与Safety Area是所有后续标准的骨架
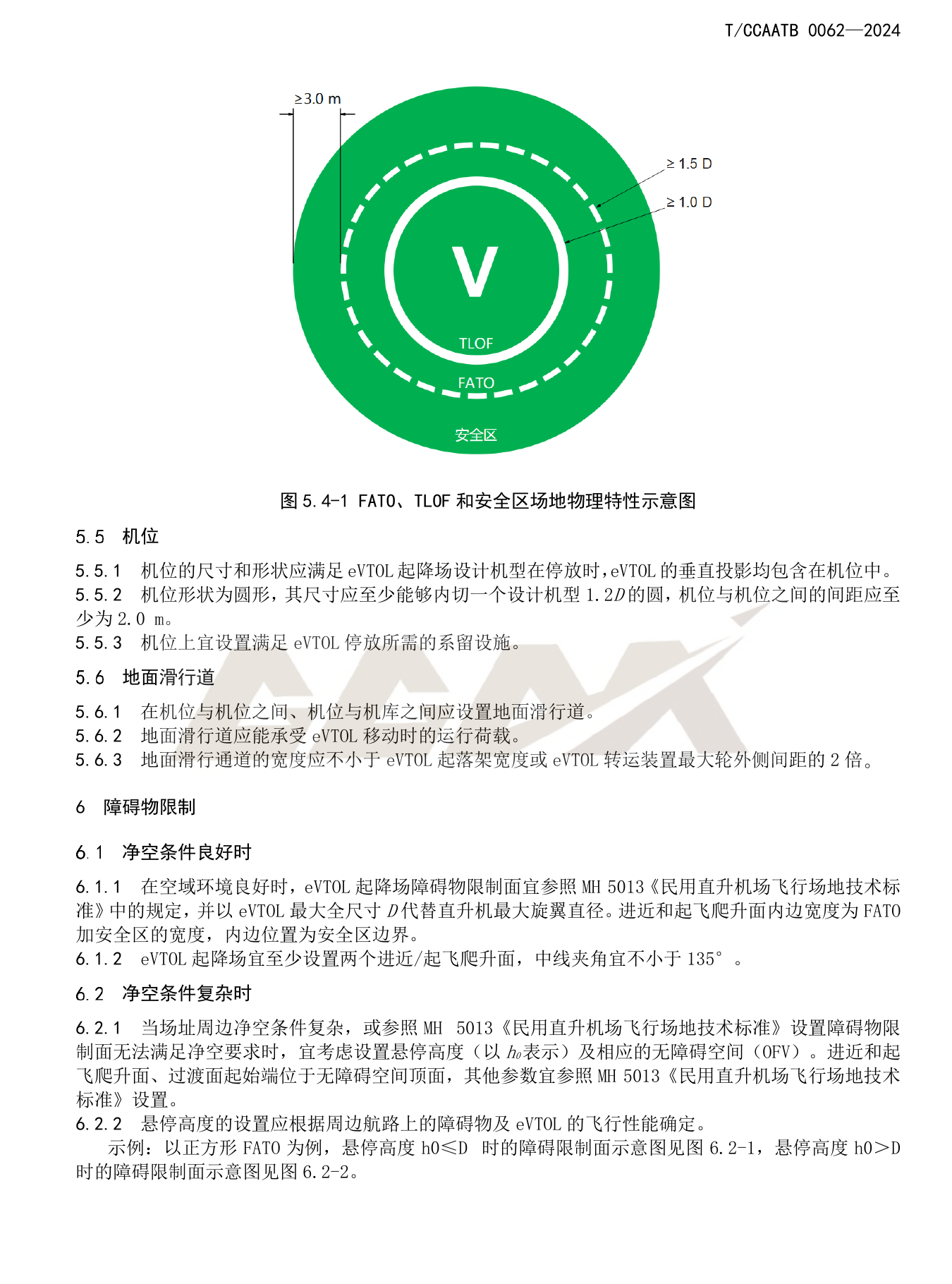
ICAO Annex 14 Volume II 对 FATO 与 TLOF 的定义构成了后续标准的底层语言。FATO 是完成最终进近至悬停或着陆、并开始起飞动作的区域;TLOF 是直升机可以接地或离地的区域;Safety Area 是围绕 FATO、用于降低航空器意外偏离 FATO 风险的保护区。
这套定义的工程含义是:
- FATO 控制“空中最后阶段和起飞初始阶段”的包容空间。
- TLOF 控制“真正接地/离地”的承载空间。
- Safety Area 不是运行目标区,而是误差缓冲区。
- 障碍物限制面不是从 TLOF 起算,而是通常围绕 FATO 和 Safety Area 建立。
因此,障碍物限制的几何构型必须先明确:FATO在哪里,Safety Area边界在哪里,进近面/起飞爬升面从哪里起算。
(二)Doc 9261解释了1D、0.83D与sub-1D的工程原因
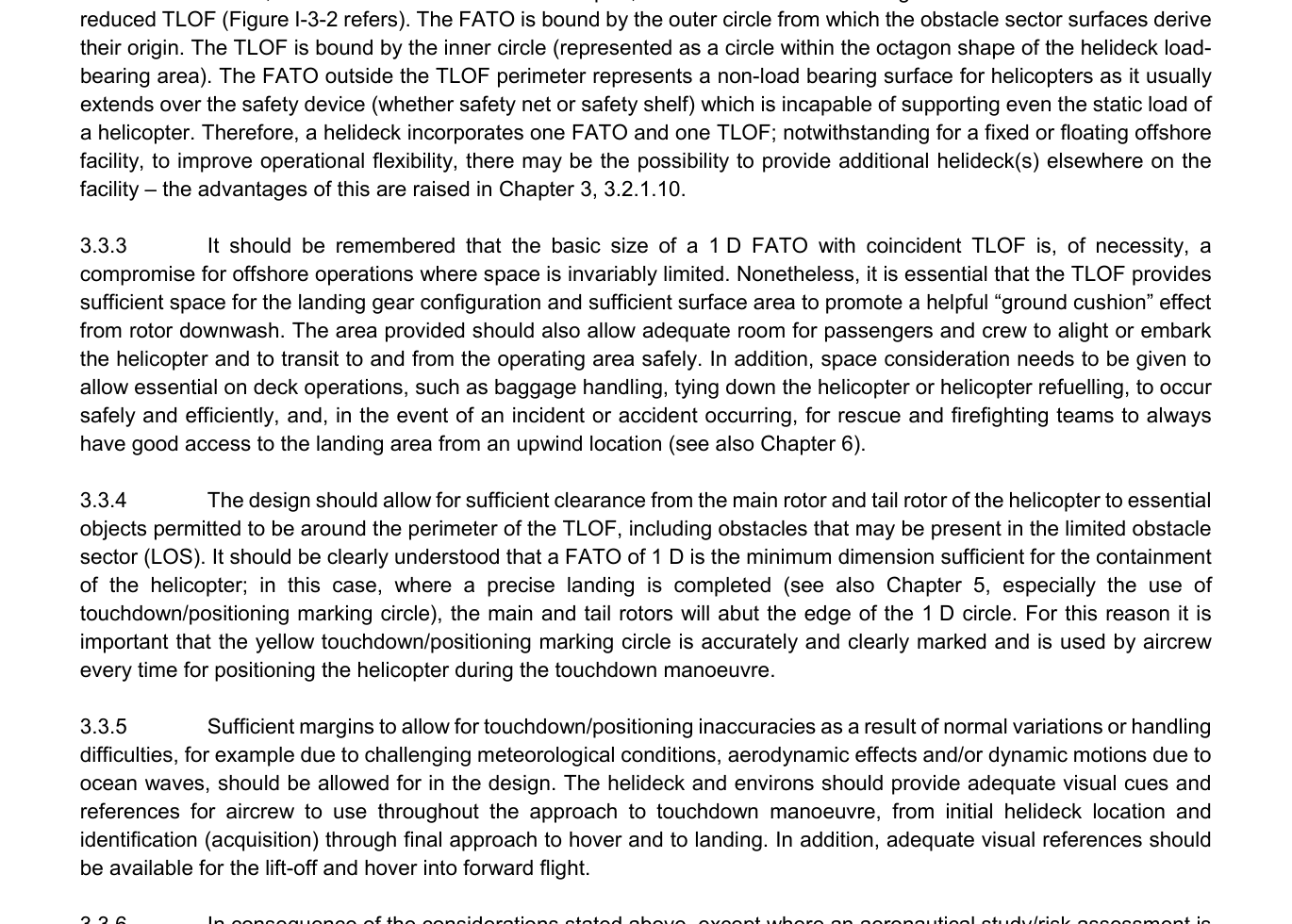
ICAO Doc 9261 Heliport Manual 对 Annex 14 的条文给出工程解释。尤其重要的是,它解释了 1D FATO 与 0.83D TLOF 的关系:1D FATO 提供直升机整体包容;TLOF 可以在特定场景下小于 1D,但这是承载面缩小,不代表障碍物保护边界也同步缩小。
从几何上理解:
1D FATO = 航空器整体包容圆
0.83D TLOF = 起落架/接地点所需的最小承载区域
sub-1D TLOF ≠ sub-1D obstacle protection
这解释了为什么很多标准中会出现“FATO较大、TLOF较小”的组合。FATO负责飞行安全包络,TLOF负责承载和接地定位,两者功能不同。
(三)传统heliport的OLS是一套从FATO/Safety Area向外展开的斜面体系
在传统直升机场中,障碍物限制面(Obstacle Limitation Surfaces, OLS)主要包括:
- 进近面(Approach Surface)
- 起飞爬升面(Take-off Climb Surface)
- 过渡面(Transitional Surface)
- 特殊场景下的无障碍物扇形面、限制障碍物扇形面等
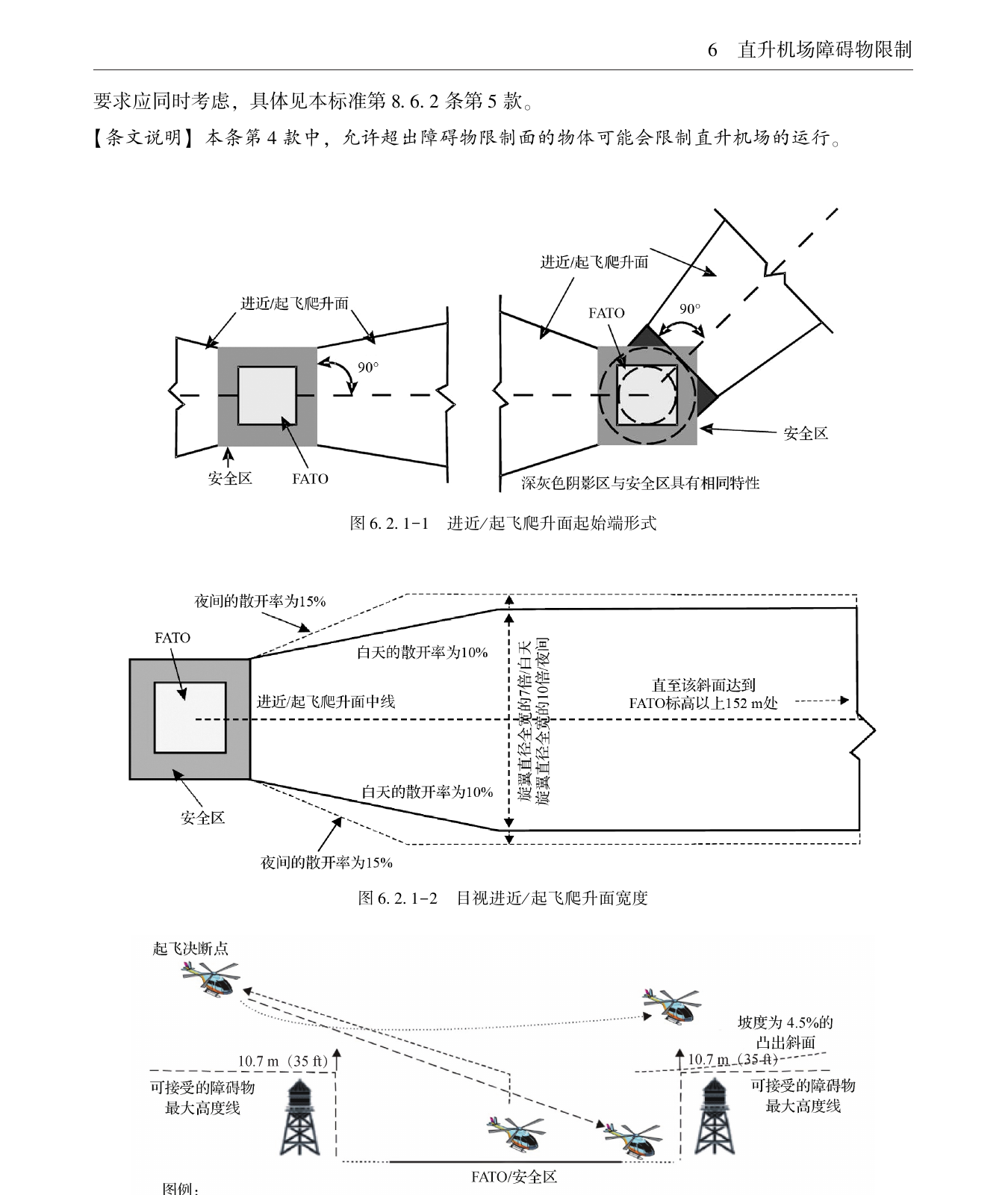
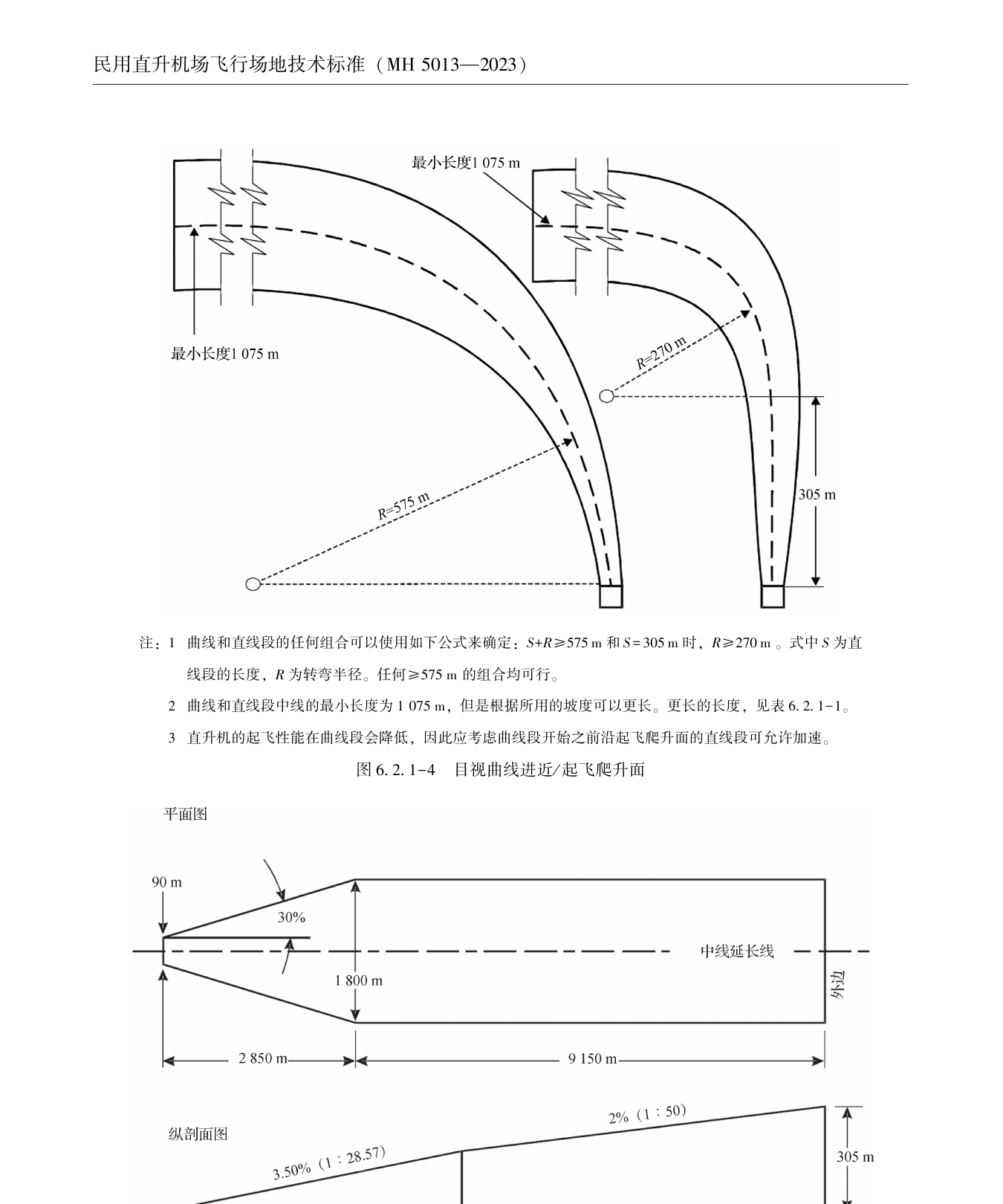
MH5013-2023 对 OLS 的图示清晰反映了这一源头几何:进近面和起飞爬升面的内边设置在 Safety Area 或净空道端部,宽度与 FATO 和 Safety Area 相关,随后沿航迹方向按一定坡度向外向上延伸。
曲线进离场时,MH5013 要求曲线段不多于 1 个,且转弯半径与直线段长度之和、转弯半径本身均需满足下限。这种设置不是为了美观,而是为了保证直升机在转弯前有足够加速和稳定空间。
三、传统OLS几何的合理性与局限
(一)传统OLS的合理性
传统 OLS 的合理性来自三个前提:
- 航空器沿明确的进离场方向进入或离开。
- 航空器需要从接近地面逐步爬升或下降。
- 场址周边可提供足够长度和宽度的无障碍走廊。
这种几何模型适用于机场、郊区、开阔地、河岸、低密度地区等场景。对通用机场和传统直升机场而言,它具有可测量、可审查、可长期保护的优点。
(二)传统OLS的局限
传统 OLS 的问题在城市 vertiport 场景下会被放大:
- 长距离斜面要求会穿越大量建筑物。
- 城市屋顶起降场往往没有完整的低角度进近通道。
- eVTOL 具备更强的垂直段能力,传统 OLS 未充分利用这一能力。
- 如果机械套用 OLS,很多城市核心区场址会在净空审查阶段直接失败。
因此,vertiport 标准开始引入 OFV:不是要求城市为航空器让出一条很长的坡面,而是允许航空器在受保护的垂直空间内上升到一定高度,再进入传统进离场保护面。
四、EASA/CASA/中国路线:从OLS发展到OFV
(一)EASA的OFV:从程序体积推导保护体积
EASA PTS-VPT-DSN 的 Chapter D 分为两部分:Subpart 1 是 OLS,Subpart 2 是 OFV。这说明 EASA 并未否定传统 OLS,而是在其基础上增加城市复杂场景所需的垂直保护体积。
EASA 的 OFV 源于航空器飞行手册(AFM)中的垂直起降程序参数,包括 h1、h2、TOwidth、TOfront、TOback、FATOwidth、FATOfront、FATOback、θapp、θdep 等。
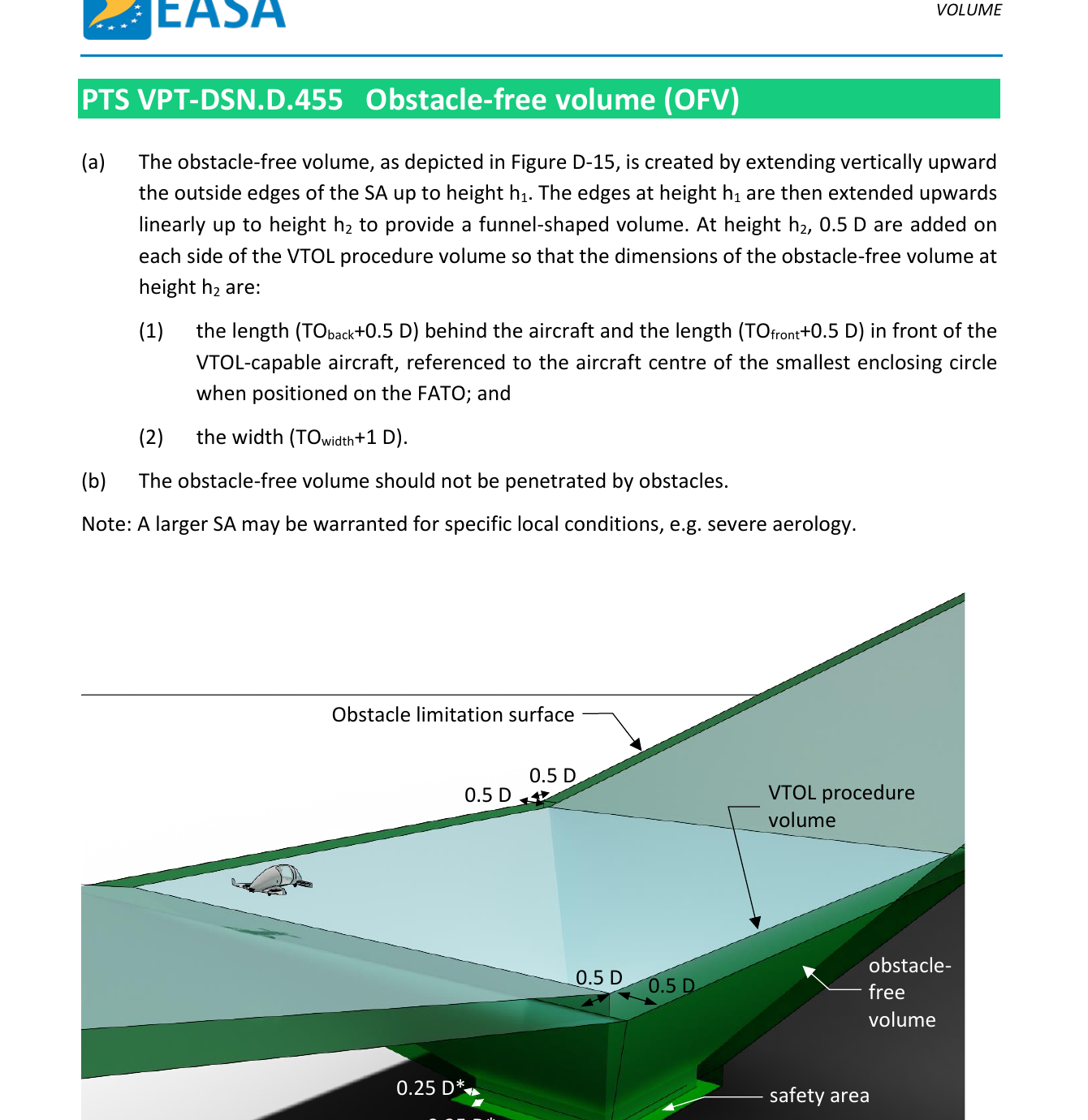
其核心几何逻辑为:
第一段:从 Safety Area 外边界垂直向上至 h1
第二段:从 h1 至 h2 线性外扩,形成漏斗状空间
第三段:在 h2 高度处接入进近面和起飞爬升面
EASA 的合理性在于,它把 OFV 与航空器性能和 AFM 程序绑定,属于性能化方法。它不是简单规定一个固定圆柱或方锥,而是要求垂直起降程序本身给出空间需求。
不足在于,对工程项目前期咨询而言,AFM 参数往往不完整,尤其在机型尚未完全适航取证时,参数不稳定,导致前期选址难以快速判断。
(二)CASA的FPA/VPS/OFV表达更适合工程建模
CASA AC139.V-01 大体继承 EASA 思路,但术语组织更工程化。它把保护体系拆成:
FPA = FATO Protection Area
VPS = Vertical Procedure Surface
OFV = FPA 与 VPS 之间的截锥体空间
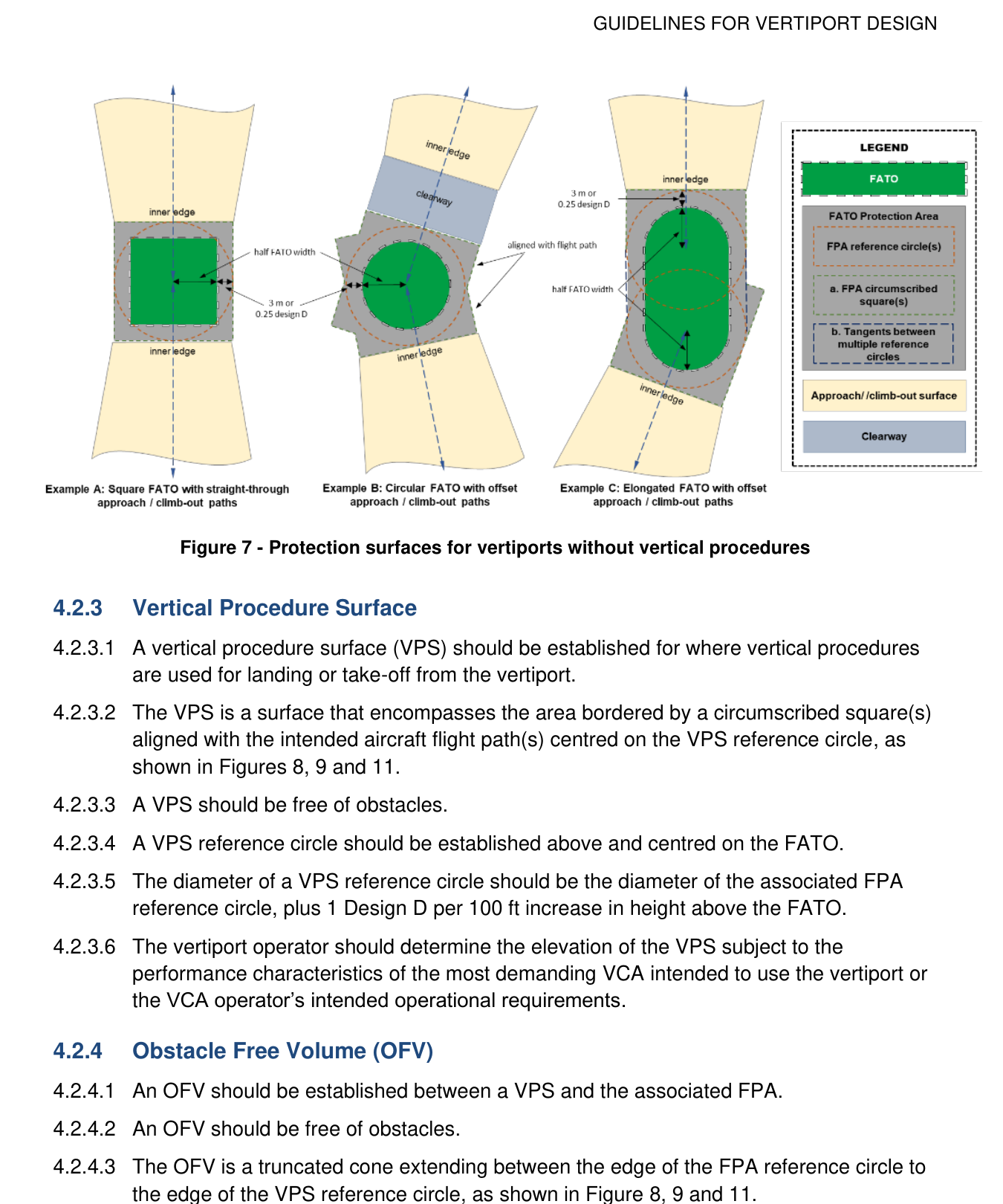
CASA 的优点是画图清楚。FPA 是地面/低空保护基准,VPS 是垂直程序开始或结束的上部面,OFV 是两者之间的连接空间。
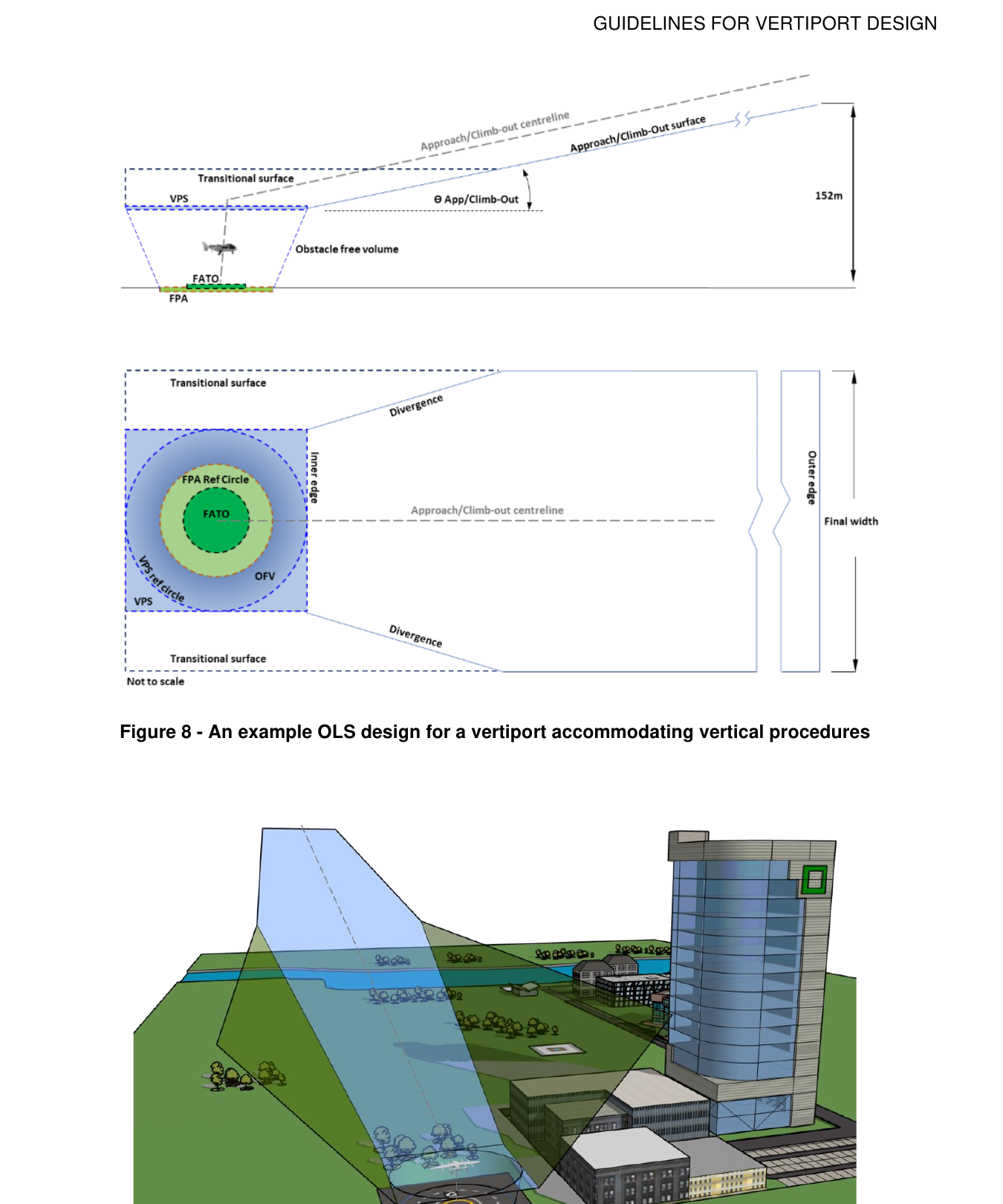
从工程上看,CASA 的表达利于 GIS、三维建模和净空校核。它把“城市复杂净空”转化为一个明确的三维体积问题,而不是只看二维剖面。
(三)中国团标采用简化OFV,适合前期工程判断
中国团标 T/CCAATB 0062-2024 的障碍物限制分两种情况:
净空条件良好:参照 MH5013,以 eVTOL 最大全尺寸 D 代替直升机最大旋翼直径。
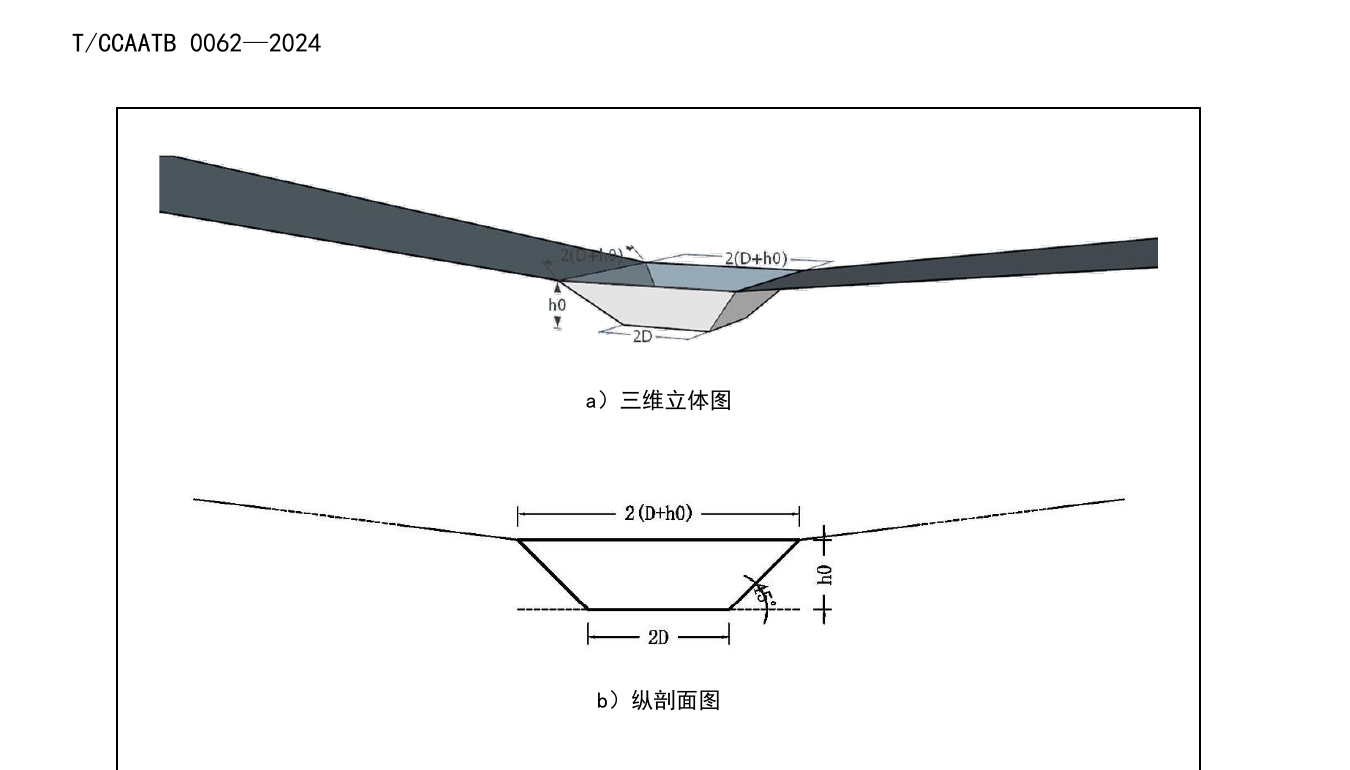
净空条件复杂:设置悬停高度 h0 和 OFV,进近面、起飞爬升面、过渡面起点位于 OFV 顶面。
团标的 OFV 有两个典型构型:
- h0≤D 时,OFV 侧面线性外扩,顶面边长至少为 2×(D+h0)。
- h0>D 时,D 高度以下按 45° 外扩,D 高度以上为竖直面,顶面边长至少为 4D。
这套方法的优点是简洁、易算、适合方案阶段快速判断。相比 EASA,它不依赖完整 AFM 参数,只需要 D 和 h0。
但它也有局限:h0 如何取值、不同 eVTOL 构型的垂直程序差异、下洗/外洗范围是否会超过 OFV 和 Safety Area,仍需专项论证。尤其当机型存在倾转过渡、低空横向机动或自动驾驶定位误差时,单纯 D+h0 几何可能不足。
五、FAA路线:不用OFV,而采用Part 77空域面+DCA
(一)FAA EB105A回到heliport imaginary surfaces
FAA EB105A 与 EASA/CASA 最大差异在于:它没有采用 OFV 作为核心障碍物保护概念,而是明确将 14 CFR Part 77 中适用于 heliport 的 imaginary surfaces 用于 vertiport。
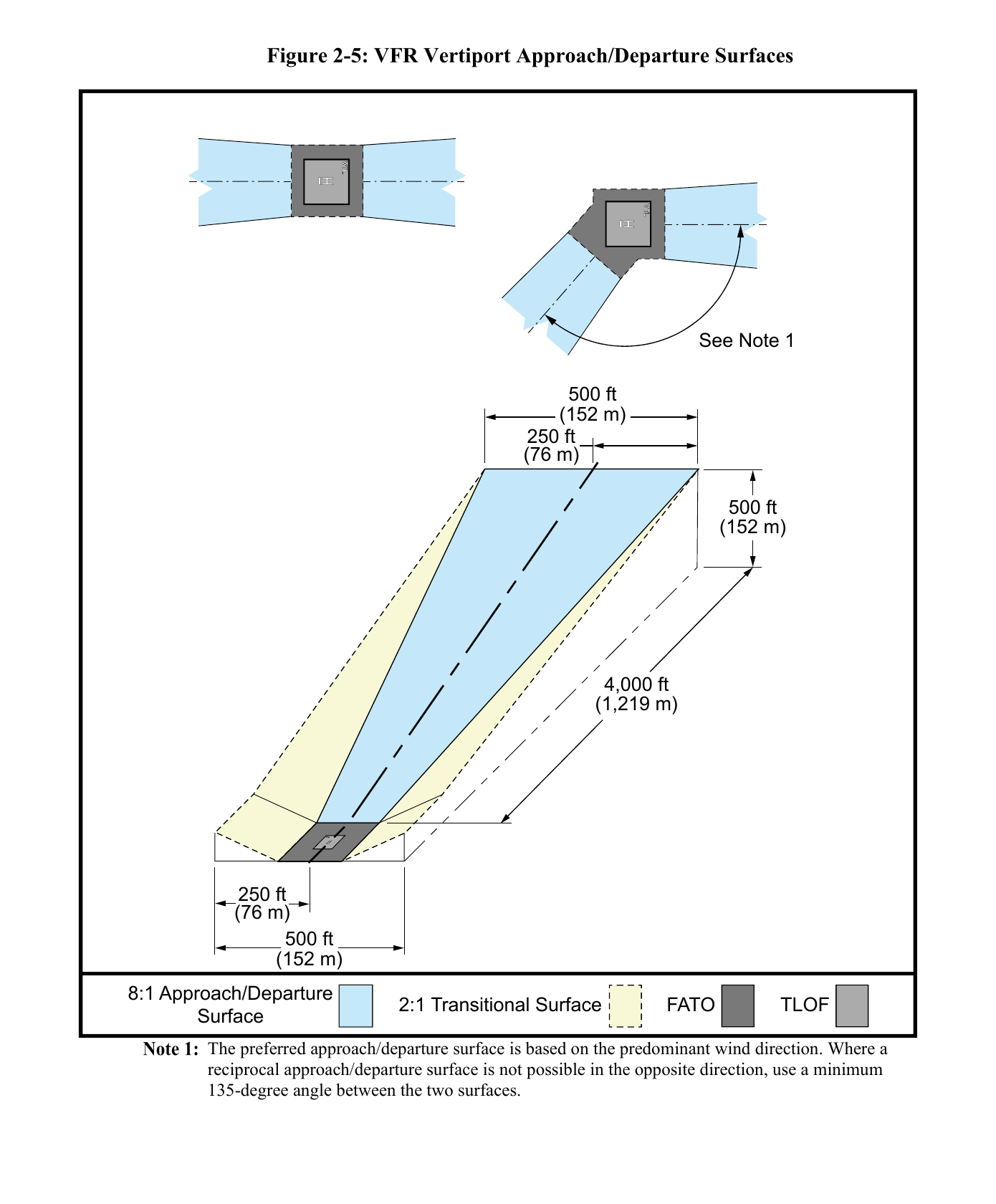
FAA 的基本 VFR 几何为:
Primary Surface = FATO
Approach / Departure Surface = 8:1,长 4000 ft,外端宽 500 ft
Transitional Surface = 2:1,向外 250 ft
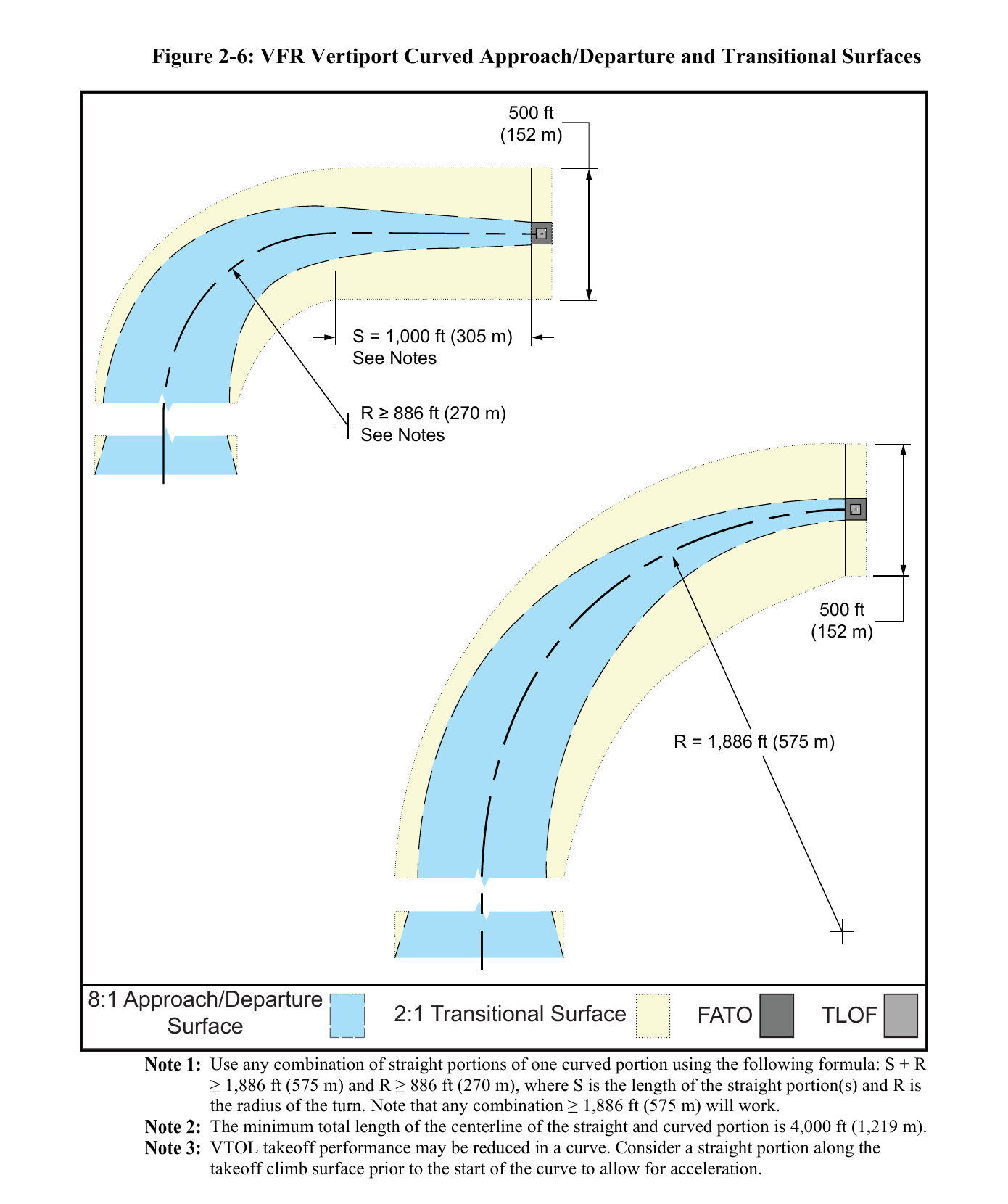
曲线进离场时,FAA 仍给出几何约束:
S + R ≥ 1886 ft / 575 m
R ≥ 886 ft / 270 m
中心线总长度 ≥ 4000 ft / 1219 m
(二)FAA对eVTOL新增风险的处理重点是DCA
FAA 不是不知道 eVTOL 与直升机不同。相反,EB105A 对 eVTOL 的差异处理非常明显,只是它没有采用 OFV,而是将新增风险放在 Downwash/Outwash Caution Area(DCA)上。
FAA 认为,当下洗/外洗风速可能达到或超过 34.5 mph(55.5 kph)时,应设置 DCA,用于限制人员、设施和财产暴露在危险风场中。更重要的是,FAA 2024 年下洗/外洗实测报告显示,部分 eVTOL 的高风速区域可能超出 Safety Area。
这说明 FAA 的安全逻辑是:
空域障碍物:沿用 Part 77 面
地面风场风险:设置 DCA
这与 EASA/CASA 的逻辑不同。EASA/CASA 侧重用 OFV 解决城市障碍物密集问题;FAA 侧重保留统一空域评价体系,同时把 eVTOL 的新型地面风险独立出来处理。
六、FAA与ICAO/EASA/CASA体系的根本差异
(一)差异一:是否承认城市垂直程序需要新的障碍物保护体积
ICAO heliport 源头体系和 FAA EB105A 都更接近传统 OLS:从 FATO 或 Safety Area 起算,按斜面控制障碍物。
EASA/CASA/中国团标则认为,在城市复杂场景中,必须允许垂直程序先把航空器抬升到一定高度,再接入进离场面,因此需要 OFV。
简化为:
FAA:FATO → 8:1/2:1 surfaces
EASA/CASA:中国复杂净空:FATO/SA → OFV → OLS
(二)差异二:FAA把eVTOL差异更多放在D/RD和DCA,而不是OFV
FAA EB105A 中,eVTOL 与直升机的差异主要体现在两个方面:
- 尺寸定义:FATO/TLOF 从 D 改为 RD,Safety Area 保留 D。
- 风场风险:新增 DCA,应对 downwash/outwash。
EASA/CASA 则把差异放在:
- OFV:为垂直程序建立三维保护体积。
- AFM:从机型程序参数推导 OFV。
- downwash protection:作为物理特性和周边安全的一部分。
(三)差异三:中国团标是“二元判断”而不是单一路线
中国团标既没有完全采用 FAA 的 Part 77 路线,也没有完全采用 EASA 的 AFM 参数化 OFV,而是采用二元判断:
净空好:MH5013 OLS
净空复杂:h0 + 简化 OFV
这在工程上是合理的,因为国内近期 eVTOL 起降场项目可能同时包括郊区低空起降点、机场内设施、城市交通枢纽屋顶、高架平台和水上平台。单一路线很难覆盖全部场景。
七、几何构型合理性评估
(一)传统OLS适合“水平进离场占主导”的场景
传统 OLS 的合理性强,但适用前提明确:需要足够开阔的进离场走廊。对于通用机场、直升机场、低密度地区起降点,它仍是最稳妥、最容易审查的方案。
适用场景:
- 郊区地面起降场。
- 机场内 vertiport。
- 河岸、湖边、海岛等具备开阔进离场方向的场地。
- 高度不敏感、障碍物较少的产业园或物流场景。
(二)OFV适合“垂直段占主导”的城市场景
OFV 的价值在于承认城市环境不可能为低角度进近面长期清空全部障碍物。它用一个受控垂直空间替代传统低空长坡面的一部分。
适用场景:
- 城市屋顶起降场。
- 高架交通枢纽起降点。
- 建筑密集区内的小型 vertistop。
- 需要避开既有障碍物、但航空器具备垂直程序能力的场址。
(三)中国团标OFV合理,但需要补充性能校核
中国团标的 OFV 简洁实用,是前期方案阶段的好工具。但后续工程设计不能只停留在几何构型,还要补充:
- 机型 AFM 或制造商程序参数。
- 定位误差和自动驾驶控制精度。
- 下洗/外洗 DCA 是否超出 Safety Area 或 OFV 投影。
- 风环境、热羽流、建筑绕流影响。
- 应急程序,包括中断起飞、失效后着陆或备降策略。
(四)FAA路线更保守,但对城市核心区不够灵活
FAA EB105A 的 8:1 进离场面和 Part 77 体系适合监管统一和空域评价,但在高密度城市核心区可能过于刚性。它通过 DCA 解决地面风场风险,却没有给出类似 OFV 的城市障碍物替代几何。
因此,若国内项目参考 FAA,应避免直接把 FAA 当成城市屋顶场景的唯一依据。FAA 的价值更适合:
- 尺寸定义中的 RD 思路。
- DCA 对下洗/外洗的风险控制。
- VFR 进离场面 8:1 和 2:1 的保守评价。
- 与机场、直升机场、Part 77 空域评价衔接的监管思路。
八、对后续工程研究的建议
(一)建立两套净空校核路径
建议在后续项目中建立“双路径校核”:
路径A:传统 OLS 校核
适用于净空良好场址,按 MH5013/ICAO/FAA 逻辑执行。
路径B:OFV + OLS 校核
适用于净空复杂场址,先构造 OFV,再从 OFV 顶面引出进近/起飞爬升面。
(二)把“h0取值”作为专项研究对象
中国团标将复杂净空问题转化为 h0,但 h0 不是随意取值。它至少应由以下因素决定:
- 周边障碍物高度。
- 航路或进离场方向的障碍物分布。
- eVTOL 机型垂直爬升性能。
- 失效工况下的安全余度。
- 定位误差和控制系统性能。
- 风环境和下洗/外洗影响。
(三)引入FAA的RD和DCA作为中国团标补充校核
中国团标目前以 D 为主。建议研究中引入 FAA EB105A 的 RD 与 DCA 作为补充:
D:整体包络,用于 Safety Area、OFV、外围控制
RD:推进器包络,用于 FATO/TLOF精细校核
DCA:下洗/外洗风场风险控制区
这可以弥补简单 D 法对多旋翼、倾转旋翼、分布式推进构型识别不足的问题。
(四)报告与图纸表达建议
后续项目成果应至少包含以下几类图:
- FATO/TLOF/Safety Area 平面关系图。
- 传统 OLS 平面图和纵剖面图。
- OFV 三维示意图和纵剖面图。
- h0≤D 与 h0>D 两种 OFV 构型图。
- FAA 8:1 / 2:1 进离场面对照图。
- DCA 与 Safety Area、OFV 投影叠合图。
- 周边障碍物穿透分析图。
九、阶段性结论
第一,Vertiport 障碍物限制的源头不是 eVTOL 标准,而是 ICAO heliport 标准体系。FATO、TLOF、Safety Area 和 OLS 是所有后续标准的共同骨架。
第二,传统 OLS 的几何逻辑合理,但它假设存在较完整的进离场走廊。城市高密度场景下,传统 OLS 可能过于刚性,因此 EASA/CASA 和中国团标引入 OFV。
第三,EASA 的 OFV 最性能化,依赖 AFM 程序参数;CASA 的 OFV 最便于工程建模;中国团标的 OFV 最简洁,适合前期方案判断;FAA EB105A 则没有采用 OFV,而是沿用 Part 77 imaginary surfaces,并用 DCA 控制 eVTOL 下洗/外洗风险。
第四,FAA 与 ICAO/EASA/CASA 体系的关键差异不在于是否重视安全,而在于风险分配方式不同:FAA 将空域障碍物交给 Part 77 面,将下洗/外洗交给 DCA;EASA/CASA/中国则把城市障碍物密集问题转化为 OFV 三维保护体积。
第五,对于国内 eVTOL 起降场工程实践,建议采用“MH5013 OLS + 团标 OFV + FAA RD/DCA补充校核”的组合方法。这样既符合国内标准基础,又能吸收国际标准对 eVTOL 新风险的识别。
没有要显示的评论
没有要显示的评论